请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TCAN4550EVM 主题中讨论的其他器件:TCAN4550、 TCAN4550-Q1
您好!
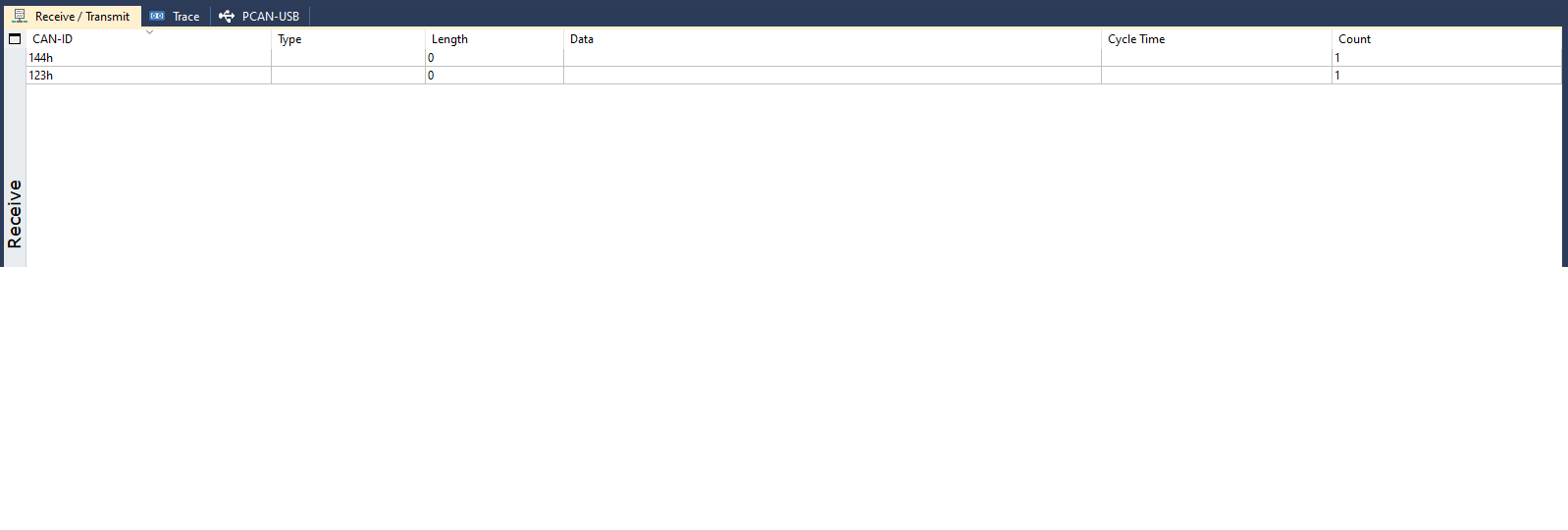
我正在使用 NXP (i.mx 8M Nano board)处理 TCAN4550、以便能够发送和接收 CAN 消息。我正在使用 PCAN 仿真器查看传输和接收的 CAN 消息。 我能够从 TCAN 板接收消息到 NXP 板 、但在将 CAN 消息从 NXP 板传输到 TCAN 板时、能够将0长度有效载荷发送到 TCAN4550 (CAN 消息、在仿真器上接收到其消息 ID 和长度=0)。我已附加 PCAN 的屏幕截图 模拟器。您的指导将受到高度赞赏。