Other Parts Discussed in Thread: TCAN4550, TCAN4550-Q1, TCAN4550EVM
主题中讨论的其他器件:TCAN4550、 、TCAN4550EVM
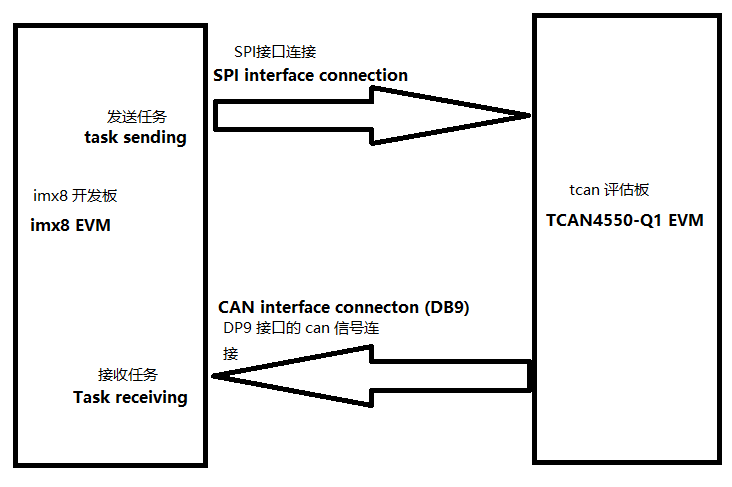
TCAN4550用于客户的项目。客户当前的软件环境是 Linux 系统。
客户在 Linux 5.8中找到 TCAN4550的驱动程序。 他们希望在 Linux4.14中应用此驱动器。 有几个问题:
(1)由芯片模拟的 CAN 接口用作主动发送接口、运行测试程序、运行其他 CAN 接口进行通信测试、并显示以下错误日志:
[2324.775233] tcan4x5x spi0.0 CAN2:出现消息 RAM 访问故障
[2324.799359] tcan4x5x spi0.0 CAN2:由于缺少就绪信号而导致的消息 RAM 看门狗事件
发送 id:0x10118f,成功大小:16[2325.758701] tcan4x5x spi0.0 CAN2:CAN_PLOT_ECHO_skb:错误! ECHO_skb 为 o!
[2325.771304] tcan4x5x spi0.0 CAN2:在 rxf0中丢失 MSG
[2325.776120] tcan4x5x spi0.0 CAN2:由于缺少就绪信号而导致的消息 RAM 看门狗事件
[2325.783622] tcan4x5x spi0.0 CAN2:错误记录溢出
[2325.788947] tcan4x5x spi0.0 CAN2:位错误未更正
[2325.794184] tcan4x5x spi0.0 CAN2:已更正位错误
[2325.799249] tcan4x5x spi0.0 CAN2:达到超时
[2325.803966] tcan4x5x spi0.0 CAN2:出现消息 RAM 访问故障
发送时、它设置为在1秒内发送一个数据包。 在测试中、我看到接口非常不稳定。 有时、在成功发送几个数据包后会出现错误消息、有时在发送数十个数据包后会出现错误消息、显示超时和位错误。 一段时间后,发送停止并退出,退出错误显示时没有发送空间。
(2)芯片模拟的 CAN 接口用作接收接口、运行测试程序和其他 CAN 接口进行通信测试、并显示以下错误日志:
[2227.070794] tcan4x5x spi0.0 CAN2:由于缺少就绪信号而导致的消息 RAM 看门狗事件
[2227.122134] tcan4x5x spi0.0 CAN2:在 rxf0中丢失 MSG
[2227.159848] tcan4x5x spi0.0 CAN2:错误记录溢出
[2227.165178] tcan4x5x spi0.0 CAN2:已更正位错误
[2227.179778] tcan4x5x spi0.0 CAN2:在 rxf0中丢失 MSG
[2227.861403] tcan4x5x spi0.0 CAN2:错误记录溢出
[2227.910141] tcan4x5x spi0.0 CAN2:位错误未更正
[2227.915388] tcan4x5x spi0.0 CAN2:已更正位错误
[2227.920461] tcan4x5x spi0.0 CAN2:达到超时
[2227.979157] tcan4x5x spi0.0 CAN2:由于缺少就绪信号而导致的消息 RAM 看门狗事件
[2227.999612] tcan4x5x spi0.0 CAN2:由于缺少就绪信号而导致的消息 RAM 看门狗事件
[2228.011034] tcan4x5x spi0.0 CAN2:由于缺少就绪信号而导致的消息 RAM 看门狗事件
[2228.049773] tcan4x5x spi0.0 CAN2:由于缺少就绪信号而导致的消息 RAM 看门狗事件
[2228.102673] tcan4x5x spi0.0 CAN2:在 rxf0中丢失 MSG
[2228.107490] tcan4x5x spi0.0 CAN2:错误记录溢出
[2228.112811] tcan4x5x spi0.0 CAN2:位错误未更正
[2228.118051] tcan4x5x spi0.0 CAN2:出现消息 RAM 访问故障
从日志信息中、您可以看到一些位错误和看门狗超时问题、 但是、尽管存在错误、但之后发送的数据包仍然可以接收(数据的内容可能是错误的)、经过一段时间后、接收端不会打印任何消息(表示没有接收到数据包)、 然后主终端的发送也会终止。 错误消息与以前相同、没有发送消息的空间。
有关发送和接收的完整信息可在附件中找到、我们期待您的回复。
e2e.ti.com/.../receive_2D00_log.txt
e2e.ti.com/.../sent_2D00_log.txt
此致
郭松珍