

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
https://e2e.ti.com/support/interface-group/interface/f/interface-forum/1210002/tcan4550-tcan4550
器件型号:TCAN4550尊敬的 Jonathan:
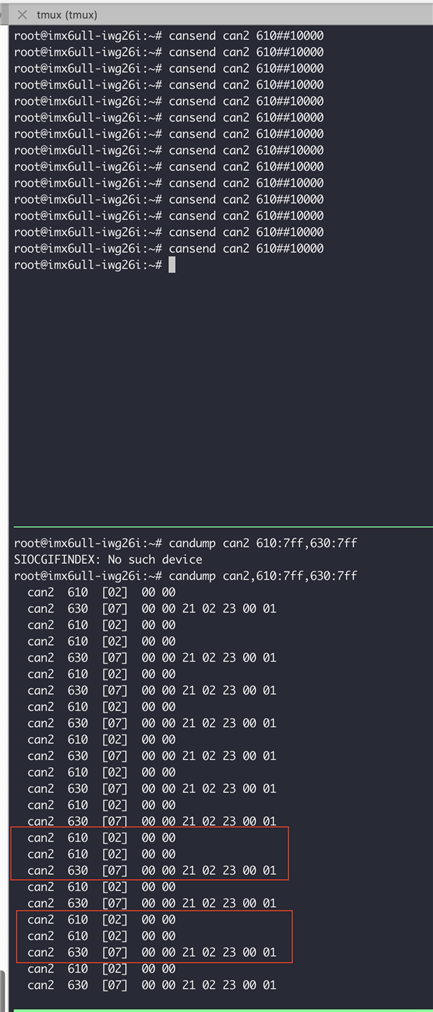
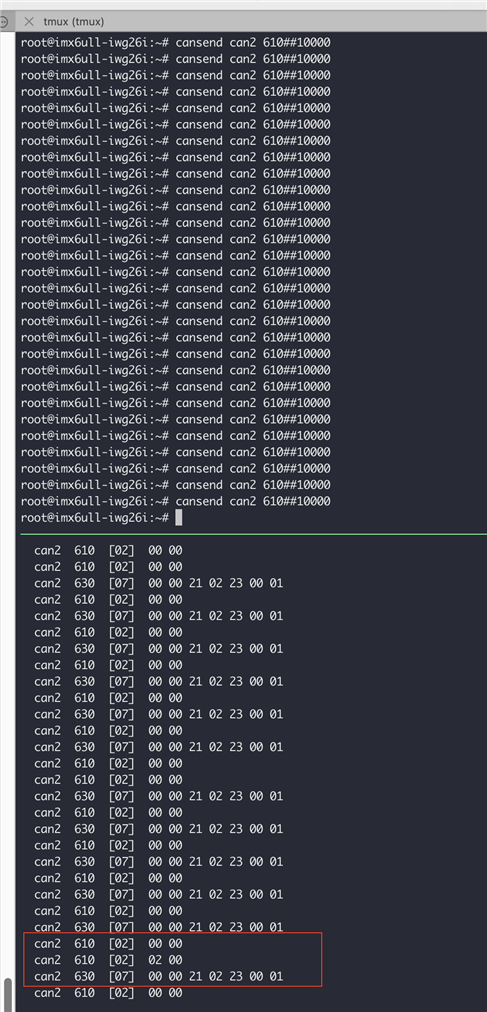
我们应用了您分享的补丁并开始测试。 我们正在使用 <0x0 0 0 26 0 1 1> 作为电流 mRAM-cfg。 由于大小限制为2K 字节、我们将无法使用 超过2K 字节的早期配置<0x0 3 2 32 10 1 32 7>。 通过使用当前配置、我们不会观察到性能的任何升级。
那么、您是否建议我们采用任何其他配置?
此致、
奈克·阿克谢



{kind=link}