Other Parts Discussed in Thread: TCAN4550-Q1, AWRL1432, TCAN4550
主题中讨论的其他器件: AWRL1432、 TCAN4550
大家好!
我正在使用适用于汽车应用的 TCAN4550-Q1在毫米波雷达 SoC (AWRL1432)上实现 SPI 到 CAN-FD。
到目前为止、我们已在 TCAN4x5x_SPI 中实现功能、并验证了它可以通过 SPI 读取/写入 TCAN4550寄存器。
但是、当我使用 TCAN4550_demo 中提供的参考代码尝试通过 CAN-FD 传输输出时、不会发送任何数据;只能看到 ID、Ctrl 和 CRC、之后不会确认。
请参阅下面的传输波形:
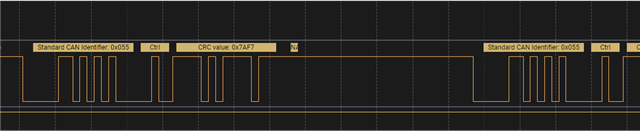
在 PCAN-Pro 上进行的测试也显示了类似的结果:虽然发送是注册的、但仅显示 ID、数据显示为0。
请参阅以下代码中的 TCAN4550_Initialization:
void TCAN4550_Initialize (void)
{
TCAN4x5x_SPI_ERR();//清除在启动期间因引脚多路复用器更改而可能设置的任何 Device_Clear ERR 标志
TCAN4x5x_TCAN4x52 Device_Enable 模式(TCAN4x5x_DEVICE_TEST_MODE_CONTROLLER);
int32_t debugVal = AHB_READ_32 (REG_DEV_MODES_AND_PINS);
//第一步尝试清除所有中断
TCAN4x5x_TCANDEV_ie Device_Interrupt_Enable ={0};//初始化为0、所有位均设置为0。
TCAN4x5x_MCAN ruptEnable (&DEV_ie);//为简单起见、禁用所有与 Device_Configure 相关的非中断
TCAN4x5x_MCAN DEV_ir ={0};//设置新的 Device_Interrupts IR 对象以轻松进行中断检查
TCAN4x5x_MCAN crupts (&DEV_ir);//请求使用当前器件(非 Device_Read)中断值更新结构
如果(dev_ir. PWRON)//如果设置了上电中断标志
TCAN4x5x_TCAN45x_ Device_Clear rupts (&DEV_ir);//清除它,因为如果它在~4分钟内没有清除,它就会进入睡眠状态
//配置 CAN 总线速度
TCAN4x5x_MCAN_TCANNomTiming Nominal_Timing_Simple ={0};//带有40 MHz 晶体的500k 仲裁((40E6 / 2)/(32 + 8)= 500E3)
TCANNomTiming。 NominalBitRatePrescaler = 2;
TCANNomTiming。 NominalTqBeforeSamplePoint = 32;
TCANNomTiming。 NominalTqAfterSamplePoint = 8;
TCAN4x5x_MCAN_TCANDataTiming ={0};// 2Mbps Data_Timing_Simple、带40 MHz 晶体(40E6 /(15 + 5)= 2E6)
TCANDataTiming。 DataBitRatePrescaler = 1;
TCANDataTiming。 DataTqBeforeSamplePoint = 15;
TCANDataTiming。 DataTqAfterSamplePoint = 5;
TCAN4x5x_MCAN_CCCR_Config cccrConfig ={0};//请记住要初始化为0、否则将导致随机垃圾!
if (frametype == CANFDLD_MCANFrameType_FD)
{
cccrConfig。 FDOE = 1;//启用 CAN FD 模式
cccrConfig。 BRSE = 1;// CAN FD 比特率开关启用
}
否则
{
cccrConfig。 FDOE = 0;//启用 CAN 模式
cccrConfig。 BRSE = 0;// CAN FD 位速率切换禁用
}
//cccrConfig。 DAR = 1;//禁用自动变速器
/*配置默认的 CAN 数据包过滤设置*/
TCAN4x5x_MCAN_GFC Global_Filter_Configuration ={0};
GFC。 RRFE = 1;//拒绝远程帧(TCAN4x5x 不支持此功能)
GFC。 RRFS = 1;//拒绝远程帧(TCAN4x5x 不支持此功能)
GFC。 ANFE = TCAN4x5x_GFC_ACCEP_TO_RXFIFO0;//如果传入消息与不匹配、则默认行为过滤器是接受扩展 ID 消息的 RXFIO0 (29位 ID)
GFC。 ANFS = TCAN4x5x_GFC_ACCEP_TO_RXFIFO0;//如果传入消息与不匹配、则默认行为过滤器是接受标准 ID 消息的 RXFIO0 (11位 ID)
*******************
*在下一个配置块中,我们将 MCAN 内核设置为:
*- 1 SID 过滤器滤芯
*- 1个 XID 滤芯
*- 5个 RX FIFO 0单元
*- RX FIFO 0支持高达64字节的数据有效负载
*- RX FIFO 1和 RX 缓冲区将不会有任何元素,但我们仍然设置了它们的数据有效负载大小,即使不是必需的
*-无 TX 事件 FIFO
*- 2个发送缓冲器、支持高达64字节的数据有效载荷
*/
TCAN4x5x_MRAM_Config MRAMConfiguration ={0};
MRAM 配置。 SIDNumElements = 1;//元素的标准 ID 数
MRAM 配置。 XIDNumElements = 1;//扩展的元素 ID 数量
MRAM 配置。 Rx0NumElements = 5;// RX0元素数量
MRAM 配置。 Rx0ElementSize = MRAM_64_RX0;// Byte_Data 数据有效载荷大小(使用定义)
MRAM 配置。 Rx1NumElements = 0;// Rx1元素数量
MRAM 配置。 Rx1ElementSize = MRAM_64_Rx1;// Byte_Data 数据有效载荷大小(使用定义)
MRAM 配置。 RxBufNumElements = 0;// RX 缓冲区元素数量
MRAM 配置。 RxBufElementSize = MRAM_64_Rx;// Byte_Data 缓冲区数据有效载荷大小(使用定义)
MRAM 配置。 TxEventFIFONumElements = 0;// TX 事件 FIFO 元素数
MRAM 配置。 TxBufferNumElements = 2;// TX 缓冲器元素数量
MRAM 配置。 TxBufferElementSize = MRAM_64_TX Byte_Data 缓冲区数据有效载荷大小(使用定义)
//使用上述设置配置 MCAN 内核,该块中的这些更改都是受保护的写入寄存器,因此我们只需一次性将其淘汰
TCAN4x5x_MCAN_EnableProtectedRegisters ();//开始设置可访问受保护的寄存器
TCAN4x5x_MCAN_ConfigureCCCRRegister (&cccrConfig);//启用 FD 模式和位速率切换
TCAN4x5x_MCAN_ConfigureNominNoi Timing_Simple (&TCANNomTiming);//设置标称/仲裁位时序
TCAN4x5x_MCAN_ConfigureFD Timing_Simple (&TCANDataTiming);//设置 CAN FD 时序
TCAN4x5x_MRAM_CLEAR ();//清除所有 MRAM (将0写入所有 MRAM)
TCAN4x5x_MRAM_Configure (&MRAMConfiguration);//设置与 MRAM 配置相关的适用寄存器
TCAN4x5x_MCAN_DisableProtectedRegisters ();//禁用受保护的写入并使器件退出初始化模式
//设置要为 MCAN 启用的中断
TCAN4x5x_MCAN_MCAN_ie Interrupt_Enable ={0};//请记住要初始化为0、否则将得到随机垃圾!
例如、CAN_ie。 RF0NE = 1;// RX FIFO 0新消息中断启用
TCAN4x5x_MCAN_ConfigureInterruptEnable (&mcan_ie);//启用相应的寄存器
//设置过滤器,此过滤器会将 ID 为0x055的任何消息标记为优先级消息
TCAN4x5x_MCAN_SID_Filter SID_ID ={0};
SID_ID。 SFT = TCAN4x5x_SID_SFT_CLASSIC;// SFT:标准滤波器类型。 配置为经典滤波器
SID_ID。 SFEC = TCAN4x5x_SID_SFEC_PRIORITYSTORX0;//标准滤波器元件配置、将其作为优先级消息存储在 RX FIFO 0中
SID_ID。 SFID1 = 0x055;// SFID1 (经典模式滤波器)
SID_ID。 SFID2 = 0x7FF;// SFID2 (经典模式屏蔽)
TCAN4x5x_MCAN_WriteSIDFilter (0、&SID_ID);//写入 MRAM
//将 ID 0x12345678存储为优先级消息
TCAN4x5x_MCAN_XID_Filter XID_ID ={0};
XID_ID。 EFT = TCAN4x5x_XID_EFT_CLASSIC;// EFT
XID_ID。 EFEC = TCAN4x5x_XID_EFEC_PRIORITYSTORX0;// EFEC
XID_ID。 EFID1 = 0x12345678;// EFID1 (经典模式滤波器)
XID_ID。 EFID2 = 0x1FFFFFFF;// EFID2 (经典模式掩码)
TCAN4x5x_MCAN_WriteXIDFilter (0、&XID_ID);//写入 MRAM
/*配置 TCAN4550非 CAN 相关功能*/
TCAN4x5x_DEV_CONFIG devConfig ={0};//请记住初始化为0、否则将获得随机垃圾信息!
devConfig。 SWE_DIS = 0;//保持睡眠唤醒错误启用(它是禁用位、而不是启用)
devConfig。 DEVICE_RESET = 0;//未请求软件复位
devConfig。 WD_EN = 0;//看门狗已禁用
devConfig.nWKRQ_config = 0;//镜像 INH 函数(默认)
devConfig。 INH_DIS = 0;// INH 已启用(默认设置)
devConfig。 GPIO1_GPO_CONFIG = TCAN4x5x_DEV_CONFIG_GPO1_MCAN_INT1;// MCAN nINT 1 (默认)
devConfig。 FAIL_SAFE_EN = 0;//失效防护已禁用(默认设置)
devConfig。 GPIO1_CONFIG = TCAN4x5x_DEV_CONFIG_GPIO1_CONFIG_GPO;// GPIO 设置为 GPO (默认)
devConfig。 WD_ACTION = TCAN4x5x_DEV_CONFIG_WDT_ACTION_nINT;//看门狗设置中断(默认)
devConfig。 WD_BIT_RESET = 0;//不复位看门狗
devConfig.nWKRQ_VOLTAGE = 0;//将 nWKRQ 设置为内部电压轨(默认值)
devConfig。 GPO2_CONFIG = TCAN4x5x_DEV_CONFIG_GPO2_NO_ACTION;// GPO2没有行为(默认)
devConfig。 CLK_REF = 1;//输入晶体为40 MHz 晶体(默认)
devConfig。 WAKE_CONFIG = TCAN4x5x_DEV_CONFIG_WAKE_Both_EDGE;//唤醒引脚可由任一边沿触发(默认值)
TCAN4x5x_TCAN10x Device_Configure (&devConfig);//使用上述配置配置器件
TCAN4x5x_CCAN4x5x_T Device_Set (TCAN4x5x_DEVICE_MODE_NORMAL);//由于配置已完成、因此设置为正常模式。 这条线路将通过上拉电阻器
TCAN4x5x_MCAN_ClearInterruptsAll ();//重置所有 MCAN 中断(不包括任何 SPIERR 中断)
}
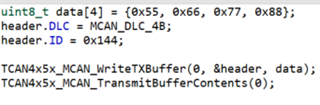
请参阅下面的我如何发送 CAN-FD 消息:
void TCAN4550_Uint32_t Transmit_Schedule msg_id (uint32_t、
uint8_t * txmsg、
uint32_t len)
{
易失性 uint32_t index = 0;
TCAN4x5x_MCAN_TX_Header ={0};//请记住初始化为0、否则将实现随机垃圾!
标头。 ID = msg_id;//设置 ID
标头。 EFC = 0;
标头。 MM = 0;
标头。 RTR = 0;
标头。 XTD = 0;//我们在此示例中未使用扩展 ID
标头。 ESI = 0;//错误状态指示器
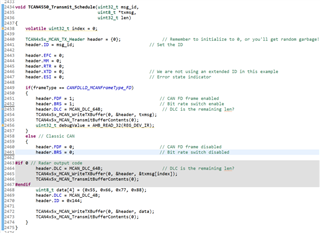
if (frametype == CANFDLD_MCANFrameType_FD)
{
标头。 FDF = 1;// CAN FD 帧已启用
标头。 BRS = 1;//位速率开关启用
标头。 DLC = mcan_dlc_64b;// DLC 是剩余的长度?
TCAN4x5x_MCAN_WriteTXBuffer (0、&HEADER、txmsg);
TCAN4x5x_MCAN_TransmitBufferContents (0);
uint32_t debugValue = AHB_READ_32 (REG_DEV_IR);
}
...
}
*我尝试将 DLC 设置为64B ,因为当我发送 txmsg 的长度(以字节为单位)时,我得到相同的错误。
我读取 REG_DEV_IR 时得到:0x00000E0

您能否建议可能是什么问题?
谢谢!
金