请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TCAN4550-Q1 主题中讨论的其他器件: TCAN4550
您好!
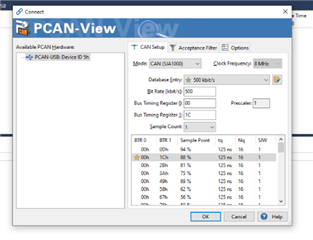
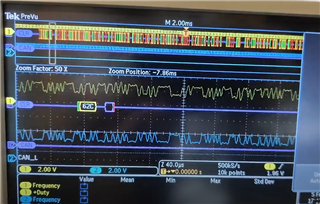
我目前正在使用 Ambarella 平台上带 SPI 接口的 TCAN4550-Q1 CAN 控制器配置 CAN 总线。 虽然我已经能够建立 CAN0网络接口并使用 canutilitiis 确认环回功能、但尝试使用独木舟或 PCAN 等工具来跟踪消息时遇到问题。 我可以使用 MSO 在 CAN 导线上观察波形数据 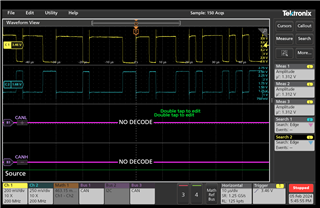
root@-:~# ip - details link show CAN0
2:CAN0: MTU 16 qdisc pfifo_fast 状态启动模式默认组默认 qlen 10
链路/ CAN 混杂0 minmtu 0 maxmtu 0
CAN 状态错误激活(错误计数器 TX 0 Rx 0)重新启动 ms 0
比特率800000采样点0.800
tq 25 prop-seg 19 phase-seg1 20 phase-seg2 10 SJW 1
m_can:tseg1 2..256 tseg2 2..128 SJW 1..128 BRP 1..512 BRP-inc 1
m_can:dtseg1 1..32 dtseg2 1..16 dsjw 1..16 dbrp 1..32 dbrp-inc 1
时钟40000000 numtxqueues 1 numrxqueues 1 gso_max_size 65536 gso_max_segs 65535


 方面取得了进展、我在从目标设备传输消息时遇到了挑战。 TCAN4x5x 控制器正在成功地从 PCAN 和独木舟接收数据。
方面取得了进展、我在从目标设备传输消息时遇到了挑战。 TCAN4x5x 控制器正在成功地从 PCAN 和独木舟接收数据。