

Other Parts Discussed in Thread: DS560DF410, DS560DF810
主题中讨论的其他器件:DS560DF410、
DS560DF810和 DS560DF410提供各种交叉点和齿轮箱模式、可用于1:2扇出、通道交叉和 NRZ/PAM4调制转换。 在本主题中、我将介绍56G 重定时器交叉点设计、如何配置交叉点/齿轮箱模式以及可用的每个交叉点/齿轮箱模式的说明。
交叉点设计:
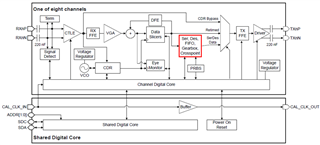
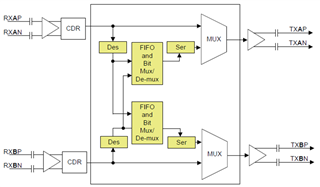
DS560DF810和 DS560DF410的通道分为双通道:ch0和 ch1、ch2和 ch3、ch4和 ch5 (仅限 DF810)、而 ch6和 ch7 (仅限 DF810)构成每个双通道。 每个双通道都包括一个集成的2x2交叉点。 交叉点存在于数据切片器和输出多路复用器之间的 Ser、DES、FIFO、齿轮箱、交叉点功能块中。 这意味着信号在通过交叉点之前重定时。 配置任何 RX 或 CDR 设置时、请注意这些设置将应用于相关通道的输入信号。 任何 TX 配置都将应用于相关通道的输出信号。
如何配置交叉点/齿轮箱模式:
如果您使用的是 DS560 CAPI、则 ChannelBringupParamStructure 内有一个变量可用于配置每个通道上的交叉点/齿轮箱模式。 在使用 InitChannel 初始化通道之前、只需将 ChParam.ugearBoxCpMode 分配给相应的模式。 如果您需要在通道已初始化后更改交叉点/齿轮箱模式、有一个称为 cpGbConfiguration 的可用函数。 只需使用相应的重定时器实例、通道编号和交叉点/齿轮箱模式调用此函数即可。
如果您不使用 DS560 CAPI、则有2个宏应按顺序执行:交叉点齿轮箱模块初始化(操作码0x41)和交叉点和齿轮箱配置(操作码0x40)。
交叉点齿轮箱模块初始化:
- 操作码:0x41
- 操作数1:通道使能位图。 启用位。 (偏移:0x00、长度:1)
交叉点和齿轮箱配置:
- 操作码:0x40
- 操作数1:通道使能位图。 启用位。 (偏移:0x00、长度:1)
- 操作数2:模式。 选项在下一节中进行了说明。 (偏移量:0x01、长度:1)
请注意、某些交叉点/齿轮箱模式(0x0、0x1、0xc、0x80)可一次在一个通道上配置。 所有剩余的交叉点/齿轮箱模式(0x2 -- 0xb)必须在两个通道上以双方式同时配置。 这是通过在执行宏0x41和0x40时启用通道使能位图操作数中的两个通道来完成的。
可用的交叉点/齿轮箱模式:
0x80:模拟低延迟路径(默认)。 这是映射 RX A–TX A 和 RX B–TX B 的默认直接模式。信号直接从数据切片器功能块传输到输出多路复用器、绕过 Ser、DES、FIFO、齿轮箱 交叉点功能块。 绕过此块的优点是输入到输出延迟更快、在模拟低延迟模式下通常为0.25ns + 36 UI。 所有其他交叉点/齿轮箱模式通过 Ser、DES、FIFO、齿轮箱、交叉点功能块传输信号、 从而导致0.25ns + 421 UI 的典型输入至输出延迟。
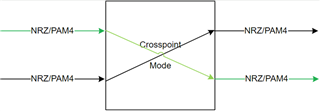
0x00:直线模式。 此模式映射 RX A–TX A 和 RX B–TX B、这与模拟低延迟模式类似、但信号通过 Ser、DES、FIFO、齿轮箱、交叉点功能块路由。 直接模式在直接和交叉点模式间切换的应用中很有用、因为输入到输出延迟在整个器件运行过程中将保持一致。
0x01:交叉点模式。 此模式实施通道交叉、映射 RX A–TX B 和 RX B–TX A。
0x02:从 RX A 广播。 此模式采用扇出、将 RX A 映射到 TX A 和 TX B。

0x03:从 RX B 广播。 此模式采用扇出、将 RX B 映射到 TX A 和 TX B。

0x04:齿轮箱多路复用器至 TX A。 这种模式可用于将 RX A 和 RX B 上的两个重定时 NRZ 流合并为 TX A 上的一个 PAM4流。两个 NRZ 流必须具有相同的波特率 R (数据速率 R)。 PAM4流将采用波特率 R (数据速率2*R)。 不支持协议和编码功能。 PAM4输出的映射是可编程的。
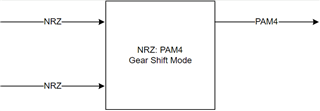
0x05:齿轮箱多路复用器至 TX B。 这种模式可以用于将 RX A 和 RX B 上的两个重定时 NRZ 流组合成 TX B 上的一个 PAM4流。两个 NRZ 流必须具有相同的波特率 R (数据速率 R)。 PAM4流将采用波特率 R (数据速率2*R)。 不支持协议和编码功能。 PAM4输出的映射是可编程的。
0x06:来自 RX A 的齿轮箱 DEMUX。 此模式可用于将 RX A 上的重定时 PAM4流拆分为 TX A 和 TX B 上的两个 NRZ 流。PAM4流将具有波特率 R (数据速率2*R)。 两个 NRZ 流都将具有波特率 R (数据速率 R)。 不支持协议和编码功能。 PAM4输入的映射是可编程的。 从 MSB/LSB 到 TX 通道 A/B 的映射可通过内部多路复用器或 PAM4符号映射进行编程。
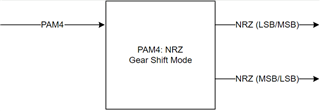
0x07:来自 RX B 的齿轮箱 DEMUX。 此模式可用于将 RX B 上的重定时 PAM4流拆分为 TX A 和 TX B 上的两个 NRZ 流。PAM4流将具有波特率 R (数据速率2*R)。 两个 NRZ 流都将具有波特率 R (数据速率 R)。 不支持协议和编码功能。 PAM4输入的映射是可编程的。 从 MSB/LSB 到 TX 通道 A/B 的映射可通过内部多路复用器或 PAM4符号映射进行编程。
0x08:将多路复用器向上转换为 TX A。 这种模式可以用于将 RX A 和 RX B 上的两个重定时 NRZ (或可选的 PAM4)流组合成 TX A 上的一个 NRZ (或 PAM4)流。两个输入流必须具有相同的波特率 R/2。 输出流将具有波特率 R。不支持协议和编码功能。
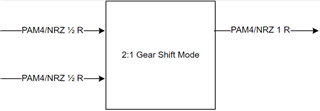
0x09:将 MUX 向上转换为 TX B。 这种模式可以用于将 RX A 和 RX B 上的两个重定时 NRZ (或可选的 PAM4)流组合成 TX B 上的一个 NRZ (或 PAM4)流。两个输入流必须具有相同的波特率 R/2。 输出流将具有波特率 R。不支持协议和编码功能。
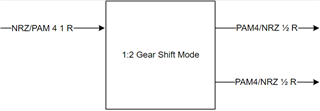
0x0A:从 RX A 对 DEMUX 进行降频转换。 此模式可用于将 RX A 上的重定时 NRZ (或可选的 PAM4)流拆分为 TX A 和 TX B 上的两个 NRZ (或 PAM4)流。输入流将具有波特率 R。两个输出流都将具有波特率 R/2。 不支持协议和编码功能。
0x0B:从 RX B 对 DEMUX 进行下变频。 此模式可用于将 RX B 上的重定时 NRZ (或可选的 PAM4)流拆分为 TX A 和 TX B 上的两个 NRZ (或 PAM4)流。输入流将具有波特率 R。两个输出流都将具有波特率 R/2。 不支持协议和编码功能。
0x0C:交叉点的 GPIO 控制。 此模式允许基于 GPIO 电平在直接模式(0x00)和交叉点模式(0x01)之间切换。