

工具与软件:
Eric、您好!
根据您的团队成员 Amy 女士的建议、正在为以下帖子的 CAN 部分打开此新主题。
如果这不是打开新主题帖的正确方法、请告知我们。
谢谢!
Arun Patil
----------------------------------------------------------------------------------------------------
Eric、您好!
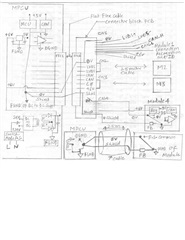
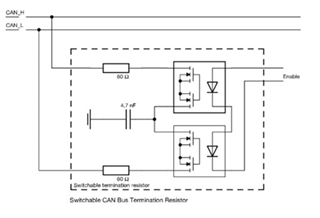
首先,我们感谢您的团队及时而准确的回复。 该系统存在多个杂散/间歇性问题、将 LVDS 拓扑更改为所有4个连接器上具有 M-LVDS 输出电平的点对点信令肯定可以解决一个主要问题。 我们正在构建原型,并将向您发布测试结果。 非常感谢您对 CAN 性能改进的意见 、我们在模块上的所有其他四个 CAN 节点上对很少的器件进行了4.7K 欧姆部分端接测试。 请查看随附的图、注意电缆屏蔽层连接到 FFC1 (MPCU 板侧)的0V 导体(位于 FGND 平面)、而在模块侧的另一端、它还通过 FB 连接到0V 导体。 模块的0V 信号线和 DGND 在同一平面上。 MPCU 和所有模块均由 MPCU 上的单个直流到直流转换器提供隔离式电源、该转换器从机箱未接地的 SMPS 获取直流电源。 您是否认为由0V 导体和屏蔽层在电缆内部形成的环路会导致由于噪声拾取而产生杂散问题? 如果是、最好让模块末端的屏蔽件保持打开状态吗?
该系统的 MCU 在 MPCU 侧具有双 CAN 控制器、但仅使用一个单元。 主机(中心)节点与连接器块(CN1、CN2、CN3、CN4)的残桩长度仅为4cm。 如果 MPCU 配置为使用两个 CAN 控制器、可在两者中间添加另一个 CAN 收发器(或使用双 Xcvr)、形成 MPCU 上的两个主机(中心)节点 HN1和 HN2、并将它们各自连接到一组连接器(CN1-CN2和 CN3-CN4)、这样连接到每个主机 CAN 节点的两个模块就好像它们是线性 CAN 网络拓扑上的终端 CAN 节点一样。 在这种情况下、所有终端节点(在模块上)都可以具有120欧姆的永久终端、并且两个主机节点都可以具有可切换的终端。如果只有一个模块连接到主机节点、则可以动态开启该终端(处理模块连接/识别信号)。 例如、如果三个模块连接到 CN1、CN2和 CN3连接器、则在 CN4连接器保持断开时、第二个主机节点 HN2上的终端将打开。 作为传统的线性 CAN 网络拓扑、由于模块功能增强、它将成为高度稳定的长期解决方案、用于处理未来更快的数据流量。 我们感谢您对寻求这一途径的想法。
谢谢!
Arun Patil
----------------------------------------------------------------------------------------------------
Eric Schott1 回复 艾米
尊敬的 Arun:
我可以查看您与 Amy 分享的方框图中的 CAN 部分。 我看不到当前布局有任何问题、并且假设系统的数据速率不是很高、我认为这种拓扑也不会有任何问题。
对于星型布局等非理想总线拓扑、主要问题是在位采样点期间信号反射干扰数据。 由于数据速率较低、采样点会进一步进入位中、因此在对位状态进行采样之前信号有更多时间稳定。 对于具有2.5m 长存根的线束、我预计振铃不会导致数据速率较低(如500kbps)的任何问题。 但是、数据完整性可能存在2Mbps 左右或更高的问题。 如果需要这些更快的数据速率、我建议使用 CAN 信号改善功能(SIC)收发器(如 TCAN1462)。 CAN SIC 收发器能够抑制非理想 CAN 网络中的振铃、从而在易受振铃影响的线束上实现更快的数据速率。
除此之外、其余的设计决策看起来合理、例如将60欧姆端接全部放置在中心节点上。 我唯一一条很小的建议是在残桩节点上添加部分端接(~4.7K 欧姆)、以帮助抑制振铃。
如果您有任何其他问题、请告诉我。
此致、
Eric Schott
