请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TCAN4550EVM 主题中讨论的其他器件: TCAN4550
工具与软件:
大家好、团队成员:
我遇到 CAN 传输问题。
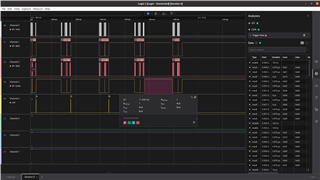
传输非常不稳定、接收方并不总是收到数据。
但是、当我将 WriteTXBuffer 和 TransmitBufferContents 之间的时间延长至超过一秒时、数据传输将变得更加稳定。
什么原因可能导致该问题?
我已经测试了我的接收设备、没有问题。
//写入 TX 缓冲区
TCAN4x5x_MCAN_WriteTXBuffer (0、标头、TxData);
//发送消息
TCAN4x5x_MCAN_TransmitBufferContents (0);