Other Parts Discussed in Thread: DP83848T
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
主题中讨论的其他器件:DP83848T工具与软件:
您好!
我正在以 Pixhawk Open 标准为基础松散地构建 UAV 飞行控制器、但我对以太网 PHY 的更改以及如何正确设置变压器/磁性元件有一些疑问。 我目前已成功与某些以太网设备进行通信、但有些设备拒绝通信/获取 IP。
您可以在此处找到 I am 所遵循的标准 :https://github.com/pixhawk/Pixhawk-Standards/blob/master/DS-010%20Pixhawk%20Autopilot%20Bus%20Standard.pdf 、其中包含第18页上的以太网 PHY 示例、但也可以在此处找到:
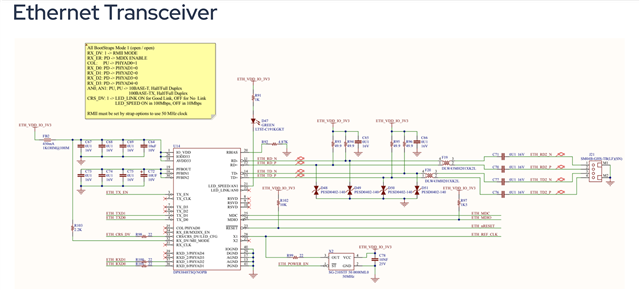
在我的应用中、我将使用通过 RMII 连接到另一个 PHY DP83825IRMQR (而不是示例 DP83848T)的 STM32H743。 它主要遵循磁性元件开放标准中的示例。
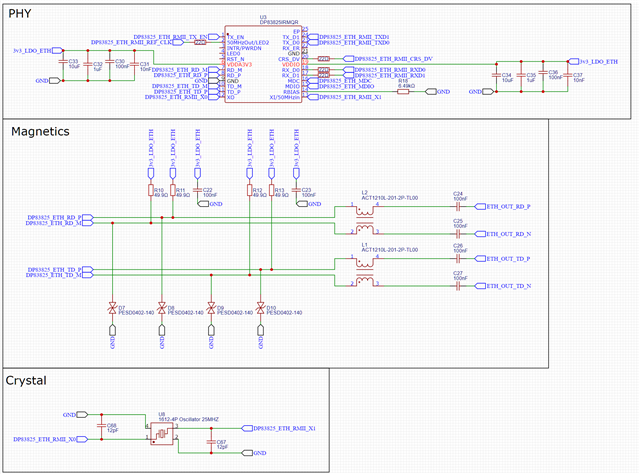
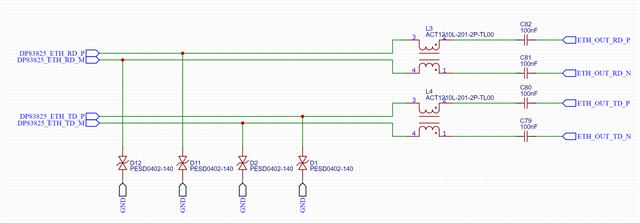
我的问题是磁性元件/变压器。 看起来开放式标准使用的是无变压器设计、这是我复制的、但某些器件存在一些连接问题。
1) 1)我是否应该将无变压器设计与 DP83825配合使用? 我正在尝试将组件尺寸/数量保持在绝对最小。
2) 2)我正在为 CMC 使用分立式变压器、对于中心抽头(否则会存在)、我该怎么办?
3) 3)我注意到它不能工作的器件也没有连接中心抽头、这是不是原因?