请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8343-Q1 工具与软件:
您好!
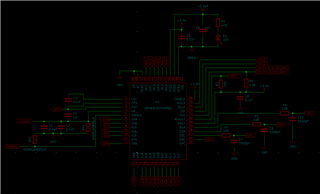
我们正在测试使用 DRV8343-Q1构建的24V BLDC 速度控制器。 DRV 驱动 MOSFET 模块 NXV08V110DB 、用于控制驱动隔膜泵的电机的速度。 您可以在下面找到使用的原理图:
- MOSFET:
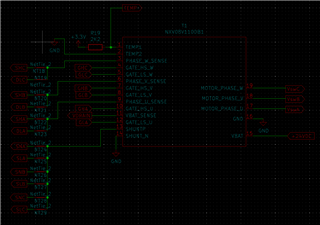
- 驱动器:
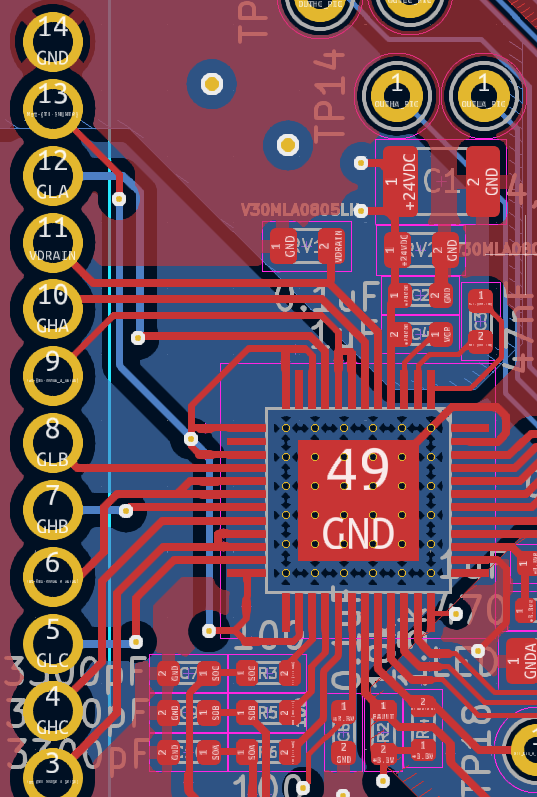
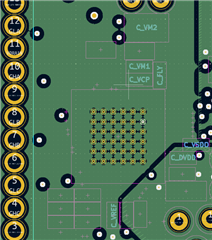
和布局:
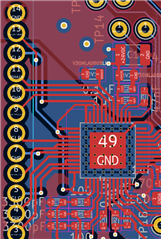
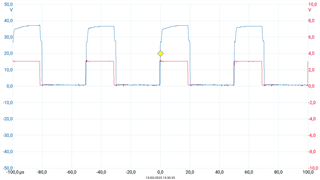
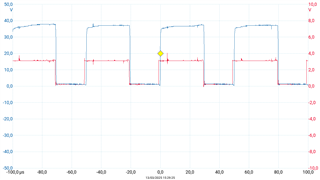
如果泵中没有背压、则系统运行良好。 在使用背压时、我们可以毫无问题地控制电机从0到100%的速度(高达近10安培)、但如果我们增加背压、则驾驶员会烧坏。 在我们的测试中、当在50% 6.5A 下工作时、无背压消耗、但当消耗量为8、5安培时、驾驶员将燃烧压力。 您可以在下面看到损坏的驱动器的图片:

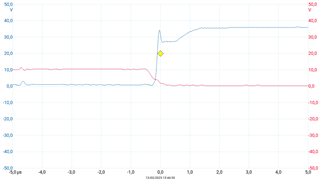
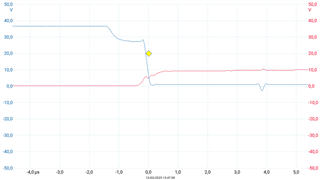
我们在论坛上看到了多个主题、它们具有相同的损坏、但未提供解决方案。 在本例中、与论坛上发布的其他电机不同、由于泵需要增加扭矩、电机不会停止但会减速。 在本主题中指出、由于在 VM 或 VDRAIN 中找到更高的电压、驱动器已损坏、因此我们包括了一些 TVS、但驱动器再次烧坏了。 我们还添加了二极管以更大限度地减小 VDRAIN 和 VM 之间的电压差、但我们可以看到、损坏情况更糟:

如果您能向我们指出解决方案或如何找出导致驱动程序烧坏的原因、我们将不胜感激。
如果您需要更多信息、请告诉我。