请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8889-Q1 工具与软件:
我们有通过 DRV8889 (芯片的最新 SI 版本)通信的定制硬件。
我们已通过对电机进行步进和失速来验证其正常运行。 通信数据包看上去正常且已经过验证。
在本例中、开路负载检测被禁用。
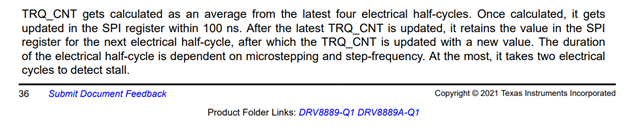
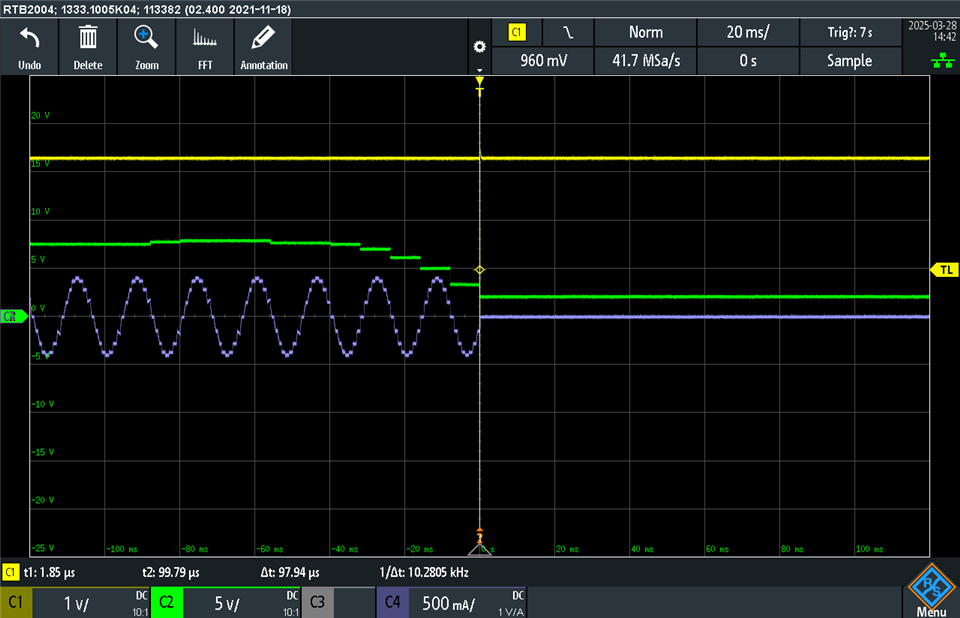
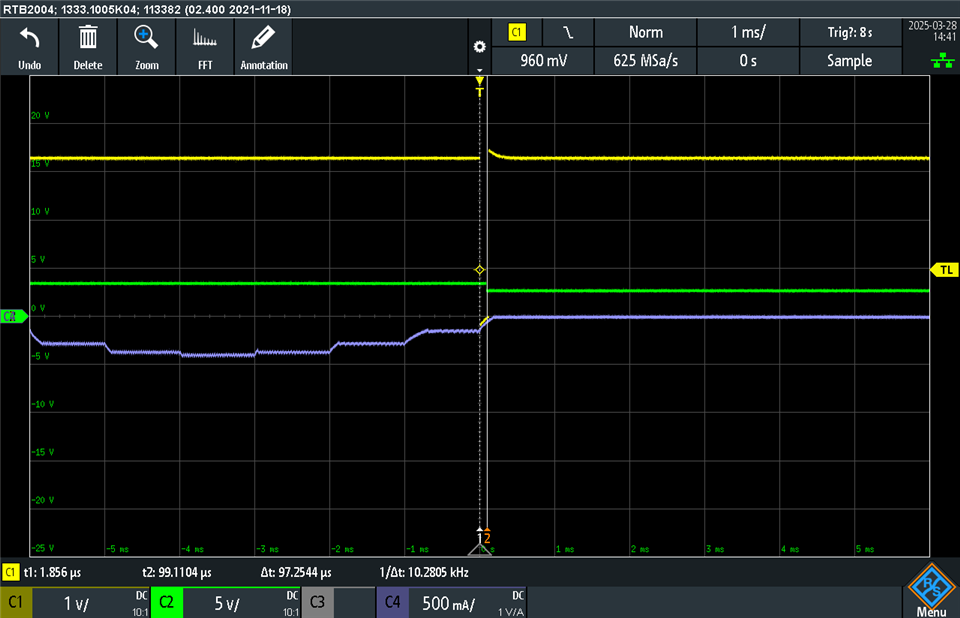
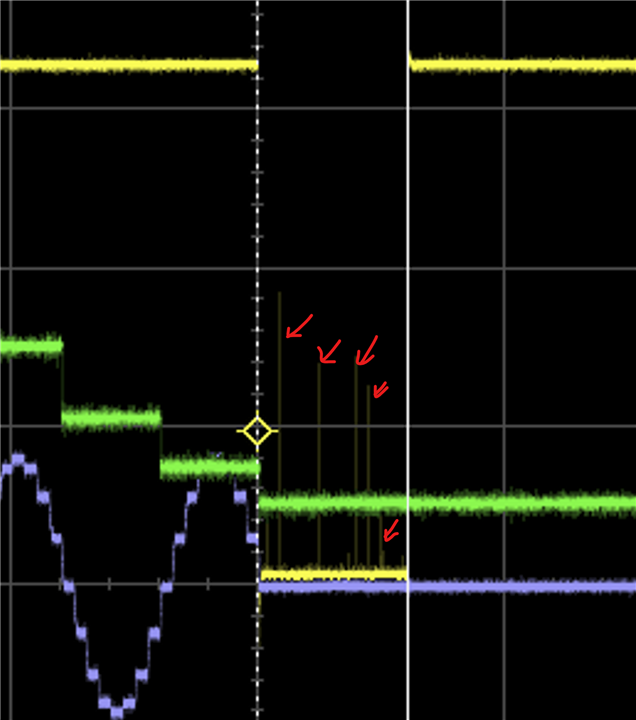
观察结果 :
- 当检测到失速情况时、它会降低 Faultline、Faultline 是我们主机软件中的 ISR。
- 主机软件检测故障线路变为低电平(或高电平)、并发送命令以清除锁存故障。
- 从故障状态寄存器读回的时间、1ms。 表明 STALL 位仍然置位。
- 但是、~250ms 后再次发出清除故障、该故障将被清除
问题 :
DRV8889是否有最短的时间清除失速? 是的、其中指定了该时间。 如果没有、如何计算?
其他信息:
我们使用的寄存器值如下:
故障:0xA5
DIAG1:0x00
DIAG2:0x00
CTRL1:0x83
CTRL2:0x0F
CTRL3:0xA4
CTRL4:0x31
CTRL5:0x18
CTRL6:0x0C
CTRL7:0x00
CTRL8:0x03