请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8818 主题中讨论的其他器件: DRV8434、 DRV8825、DRV8424
工具与软件:
大家好、团队成员:
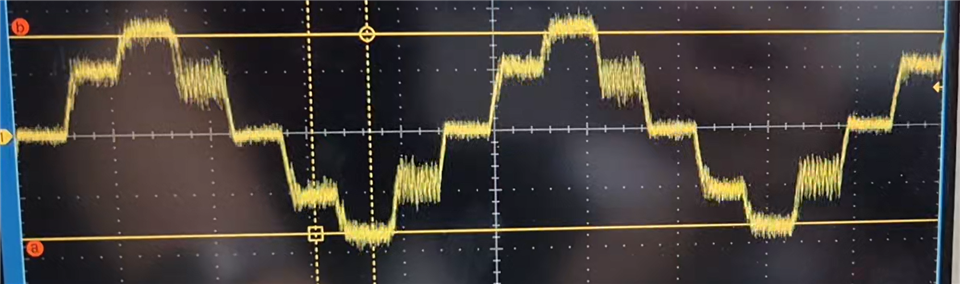
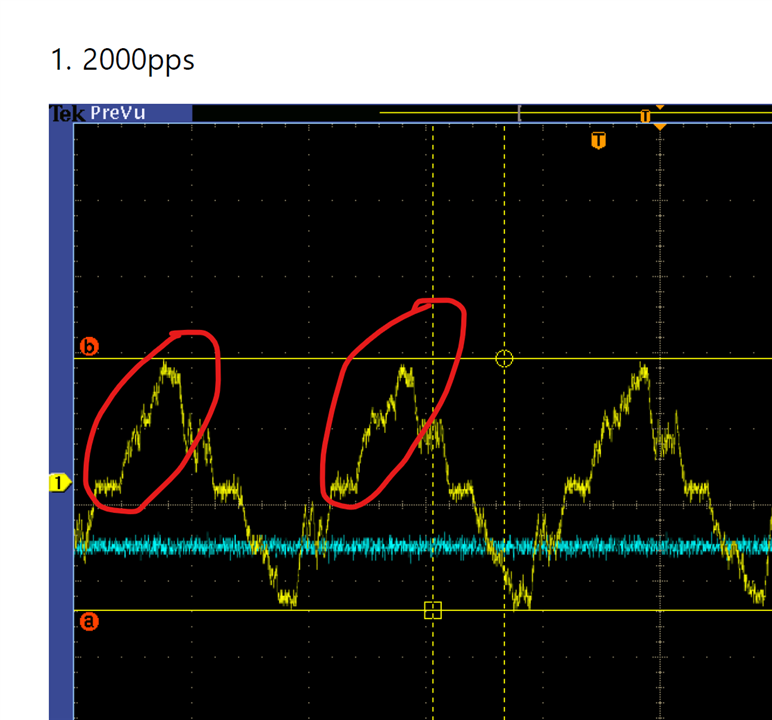
使用 DRV8818时、客户电路板上存在电桥 A 低电流问题。 它们正在验证1000pps 至5500pps 条件下的 DRV8818、但电桥 A 的电流在大约3500~4000pps 后下降。 请查看下面附件的原理图和视频片段、并告诉我如何解决此问题。
e2e.ti.com/.../Low-current-issue-of-bridge-A.docx
此致、