请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8461EVM 工具/软件:
您好、
我对静音步进衰减模式和自动扭矩模式有几个问题。
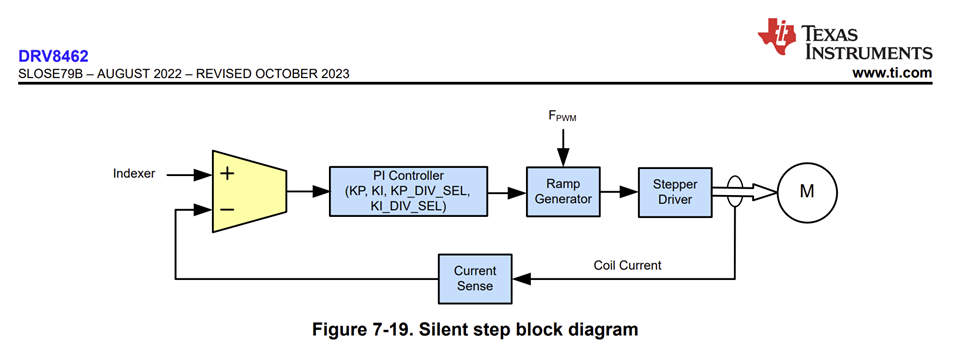
静音步进衰减模式:
Im 尝试为此模式确定正确的参数。 我有一个电机、在自动微步进模式(1/256)下、其运行速度应为每秒4到10240步进(1/8步进)。
在使用该模式时、应达到何种速度?
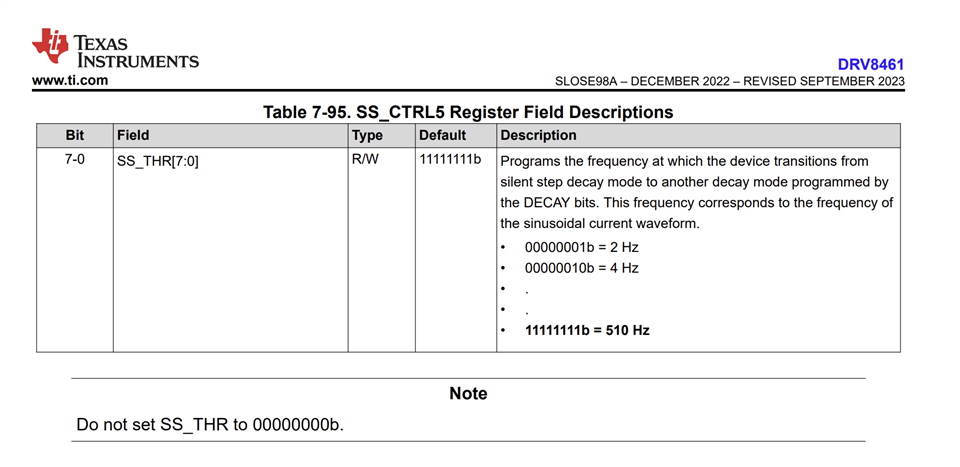
使用以下公式: fSTEP =(SS_THR * 1000 * usm)/ 256 fSTEP 在最高速度下为10240、usm 为256、因此 SS_THR 应为10Hz?
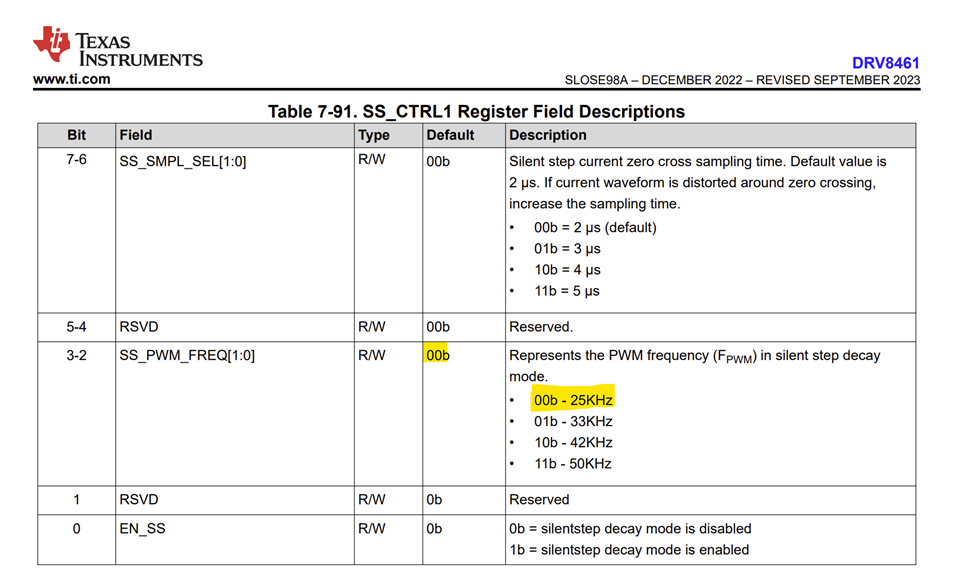
且 VM = 24V、L = 2.8mH、R = 1.8Ohm 且 UGB = 200Hz
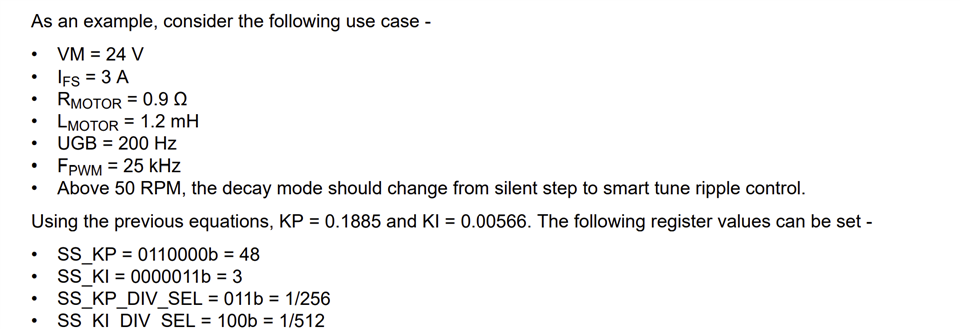
KP = 6 *π* UGB * LMOTOR/VM = 0.44
KI = KP * RMOTOR /(FPWM * LMOTOR)= 11.31
根据这些值、必须为 SS_KP 和 SS_KI 设置哪些值?
自动扭矩模式:
我知道、我应该在没有负载的情况下运行学习模式、如果速度变化+-10%、我必须再次运行该模式。 我们有不同的固定速度、因此如果为相应的测量值选择了另一种速度模式、我可以针对这些速度运行该速度、并通过 SPI 更改配置。
但是、必须将 ATQ_LRN_MIN_CURRENT 和 ATQ_LRN_STEP 设置为哪些值?
在手册中提到了这一点: 建议选择介于最大工作电流的30%至50%之间的初始电流电平。
但哪一个电流呢? 满量程电流? 以 mA 或 A 为单位? 如果是最大值、则必须将其设置为 电流例如1.7A?
此致
Thilo