请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCT8316AEVM
工具/软件:
您好、
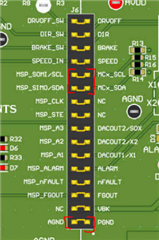
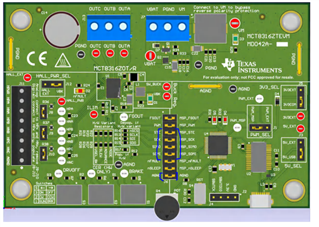
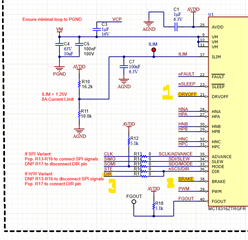
我使用非 TI MCU 与 MCT8316AEVM 板上的 MCT8316A 驱动器连接。 您能告诉我如何设置 J6上的所有引脚、以便我可以绕过 MSR430并直接与 MCT8316A 连接吗?
谢谢!
Ryan
器件型号:MCT8316AEVM
工具/软件:
您好、
我使用非 TI MCU 与 MCT8316AEVM 板上的 MCT8316A 驱动器连接。 您能告诉我如何设置 J6上的所有引脚、以便我可以绕过 MSR430并直接与 MCT8316A 连接吗?
谢谢!
Ryan