

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8243-Q1 工具/软件:
早上好、
我们遇到了驱动器过热问题、尤其是当 PWM 信号占空比介于30%和90%之间时。
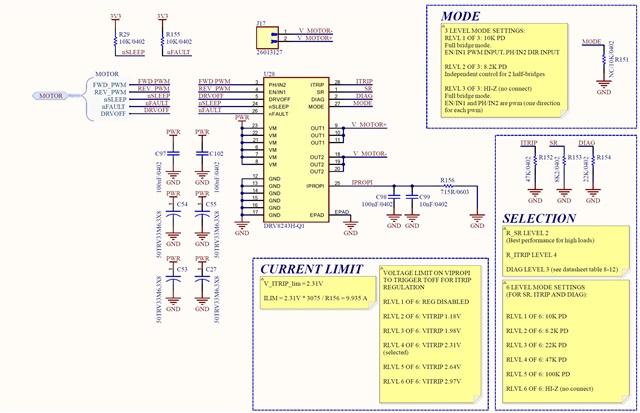
该驱动器配置为模式3 (全桥)、以10kHz 的频率由 PWM 驱动。 输出端直接连接到电机。
使用示波器分析两个输出、我们注意到、在 PWM 信号处于低电平(0)期间(另一个引脚始终为0)、两个输出都朝着正极有效。 我们认为这种情况是驱动器过热的主要原因。
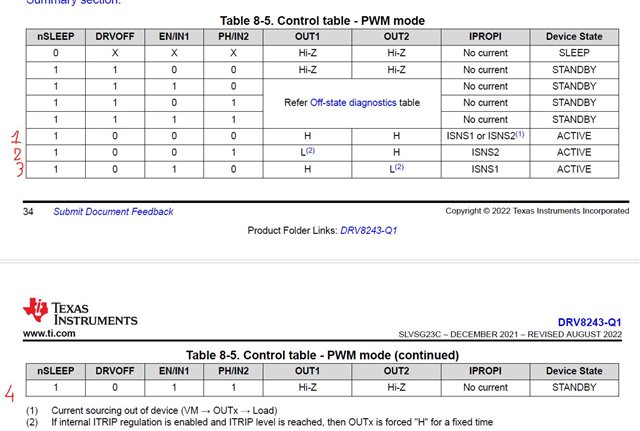
通过查看数据表、尤其是表8-5"控制表- PWM 模式"(请参阅附件)、我们可以观察到、当两个输入都为0 (用例1)时、输出都为高电平。 为了避免这种情况、我们尝试保持持续的高电平输入、以便当两个输入都为1 (案例4)时、输出处于高阻抗状态。 然而,我们没有得到期望的效果:相反,我们检测到了一个交替的方波。
我们需要避免驱动器过热、并且不需要电机制动功能。
要在不引起散热问题的情况下获得正确的行为、您建议采用哪种配置?
最好的考虑
