请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
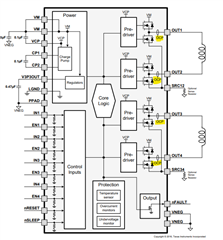
器件型号:DRV8844 工具/软件:
您好:
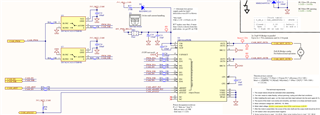
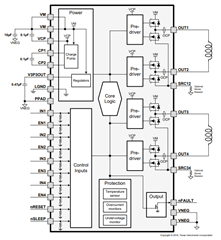
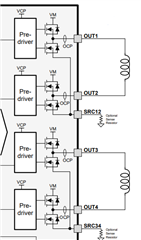
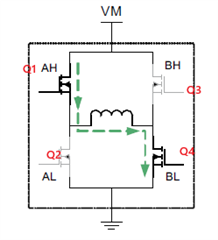
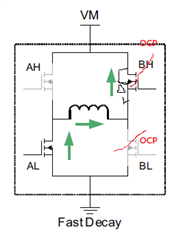
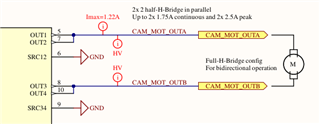
我们目前使用 DRV8844来驱动具有慢速衰减的直流电机。 为了增加可从驱动器汲取的最大电流、我们将驱动器的两个输出并联。
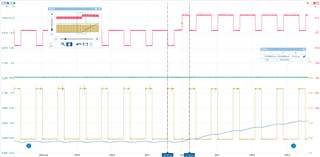
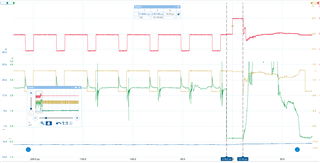
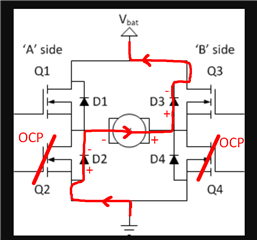
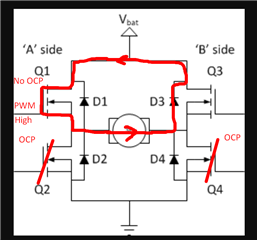
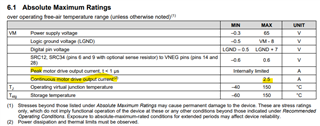
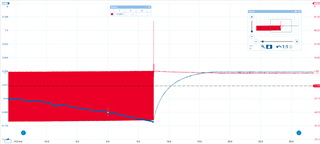
对于我们的测试、我们使用 PWM 48V @ 32kHz 和30%的占空比驱动电机。 电机在启动后不久失速。 如下图所示、施加了输出 PWM (红色)、电流(蓝色)将增加至最大值~8.64A。 该值似乎已经非常高、因为过流保护应以5A 电流触发。 出现故障时、芯片上会出现火花、随后无法使用。
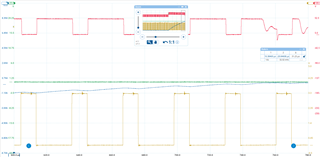
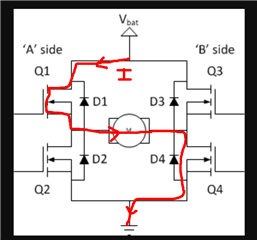
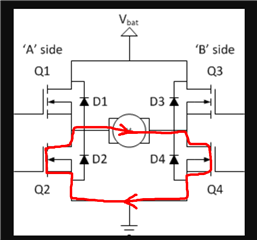
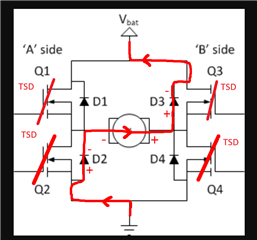
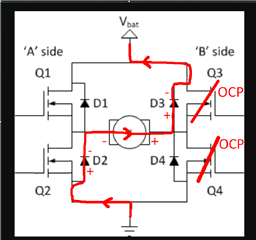
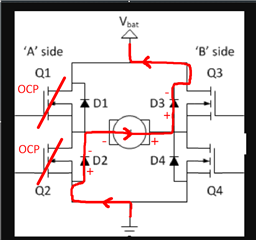
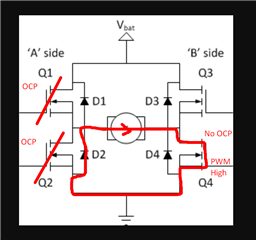
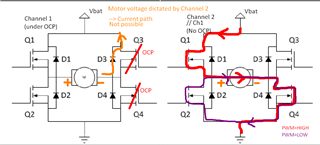
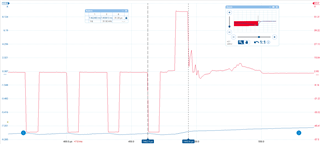
我们放大看一下发生故障时的情况。 我们可以观察到 PWM 正常运行。 当电流处于最高值时、我们观察到施加到电机上的电压反转。 当 PWM 再次变为低电平时会发生故障、导致驱动器烧毁。
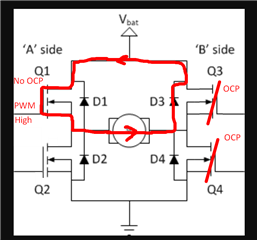
-我们认为这与我们的控制无关,因为我们所应用的 PWM 在周期开始时为非零电压。 在此图中、很明显、电压在周期结束时在驱动器输出端反相。
-我们认为这可能与慢速衰减有关,但我们需要一些支持来验证这一点。 我们也欢迎有任何其他线索来找出问题的原因。
-在 PWM 为20%的情况下执行相同的测试,电流达到6A 值,但不会导致驱动器故障。 最终、驱动器将由于过热而输入误差(我们的热像仪测量结果证实了这一点)。 因此、我们的问题似乎与高电流消耗有关。
如果您需要描述我们问题的其他信息、
感谢您的回答!