请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8889-Q1 工具/软件:
您好:
我们使用 DRV8889AQWRGERQ1驱动步进电机、并对失速检测有一些问题。
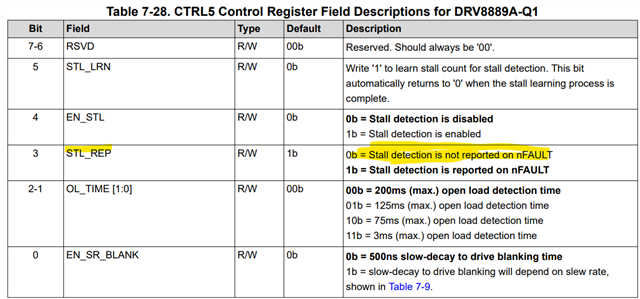
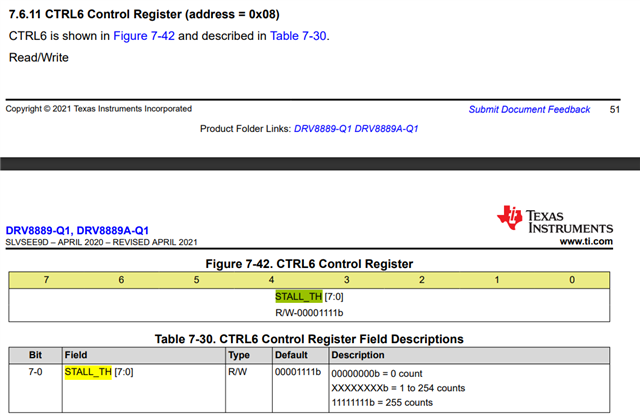
我们之前通过将 EN_STL 位设置为1并将 STALL_TH 设置为31、成功地测试了失速检测功能。 在恒定速度(STEP 引脚脉冲为10kHz)并且 TRQ_DAC 设置了 1101b (31.25%电流)(对应于120mA 的最大电流负载)的情况下、失速检测似乎可以正常工作、没有任何问题。 (衰减模式设置为默认的智能调优纹波控制)
现在、我们通过向步进电机运动添加加速和减速相位来更改实现方式。 因此、在运动开始和结束时(假设每个脉冲大约为10%)、STEP 引脚脉冲的频率在2、4、6、8和10 kHz 之间变化、引脚的 PWM 输出没有任何中断。
驾驶员是否能够支持这种情况?
"如果是,到底是什么?
直到现在、我们才设法使其正常工作。
我们在修改频率时尝试了修改 STALL_TH、但更改不会生效。 我们假设这是因为使用了失速算法;您能否确认这一点?
我们尝试启用 STL_LRN、但这也失败。
我们还尝试了 TRQ_DAC 和 STALL_TH 的几种组合、但运气不好。
——如果不能、你如何改变这种情况使它大致相同、但让失速检测工作?
提前感谢您!
Monica