

工具/软件:
您好:
我正在使用 DRV8334EVM 消息流 DRV3233_DRV3233_GUI.GUI Sensored_Trapezoidal_ 因为 DRV8334_GUI/GUI Sensored_Trapezoidal_ 不适合我。
底部栏显示“Connecting to TI Cloud Agent…(正在连接到 TI Cloud Agent)“ 然后选择“Hardware Connected“。
但电压监测器保持在 0.0V、并且电路板对 nSLEEP 开关没有反应。
我尝试了文件/编程器件、以“成功刷写“结尾、但之后没有更好的结果。 有什么想法?
这里介绍的所有问题都是在 DRV8334EVM 上观察到的、因此您可以在实验室中轻松重现。
在启动电机旋转之前、DRV8334 的配置如下:
| 位域 | 数据值 | 说明 |
|---|---|---|
| PWM_MODE | 0b000 | 6x PWM 模式 (INHx/INLx) |
| SGD_MODE | 0b00 | 具有固定峰值电流控制功能的智能栅极驱动器。 TDRVN_D 无效并被忽略。 |
| SGD_TMP_EN | 0b1 | 1bSGD 温度控制已启用。 |
| DEADT | 0b111. | 2000ns |
| DEADT_MODE | 0b0 | 当器件输入 (INHx 或 INLx) 变为低电平时、插入死区时间。 |
| DEADT_MODE_6X | 0b00 | 启用死区时间保护。 在死区时间期间、栅极驱动器控制信号被强制为低电平。 当检测到死区时间条件时、会设置 SPI 故障标志并将 nFAULT 引脚驱动为低电平。 |
| IDRVP_CFG 寄生电容 | 0b0 | IDRVP 寄存器无效并被忽略。 IDRV_RATIO 用于确定 IDRVP 参数。 |
在初始配置时、寄存器 GD_CTRL2 设置为:GD_CTRL2 [1F]= 0x0717
| P | N | |
|---|---|---|
| TDRIVE | 1.036us | 1.036us |
生成的波形波形贝尔低、显示信号 INL/GL 和 INH/GH。 探头放置在测试点 GLA、GHA 和 J9 连接器引脚 1 (INHA) 和 3 (INLA) 上。

在输入信号开关状态与栅极驱动器输出遵循命令的时刻、我们可以观察到巨大的传播延迟/死区时间为~1us。
然后、我使用 GD_CTRL2 [1F]= 0x0010 的新配置进行测试
| P | N | |
|---|---|---|
| TDRIVE | 0.143us | 0.143us |

现在您可以看到、输出跟随输入的方式更好。 您可以假设该延迟是直接选择 TDRIVE、因为测得的延迟与 GD_CTRL2 中的设置匹配。
但根据数据表、TDRIVE 是施加 IDRIVE 电流的时间。 我不明白为什么在驱动栅极之前会增加延迟。
下面是数据表中的图 6-6。 我用红色添加了我认为我观察到的内容。
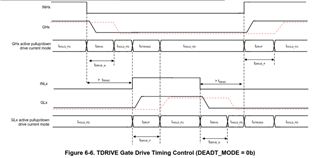
那么为什么它的行为像这样呢? 我在不同的智能栅极驱动 IC 参考上看到了对 TDrive 的许多解释、但它们都与此行为不匹配。
我们正在构建机器人 BLDC 驱动器、并计划使用 DRV8334、但到目前为止、该参考资料并不容易处理、因为数据表中关于配置步骤的说明不是很详细。
我的最终设计将使用 CSD19502Q5BT MOSFET。 我计划 MOSFET 的开关时间为~100ns、以便匹配 EMI 性能。 您能帮我解决 IDRIVE/TDRIVE/DEADT 组合应使用哪些设置吗? PWM 频率将约为 50kHz 至 100kHz、因此像第一幅图中那样、我无法承受>1us 的延迟。
感谢您的帮助、
Adrien.
