请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
主题中讨论的其他器件:DRV8702-Q1工具/软件:
你好、我正在考虑使用DRV8702 Ω 做一个电机控制器的驱动、请问如何控制电机的方向和速度、Ω
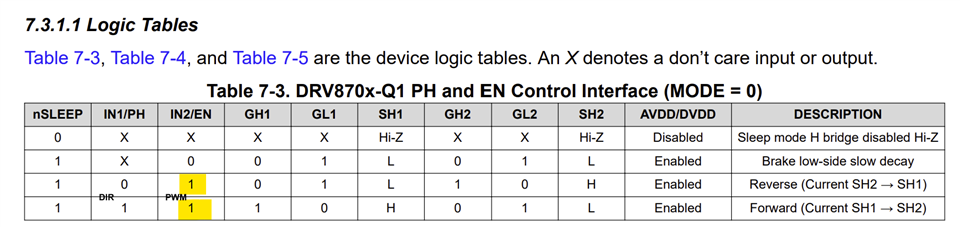
在规格书第Page 24 中介绍PWM控制接口、IN1=1?而IN1 %、则意味 PWM为0 =0?比如%端口输入PWM IN2 为0 Duty(相当于低电平%是否意味着可以输入PWM占空比为100 0)、此时 IN1 端口输入PWM(__LW_AT__Duty 为0 %–100%变化)、是否意味着电机速度从0 到最高速度?
谢谢、μ s
亚历克斯 μ s