请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8889-Q1 工具/软件:
尊敬的团队:
您能帮助我了解以下问题吗?
1.我了解到当我们更改电机转速时需要更改 STALL_TH。 通常、在加速时应更改该值以增大或减小 STALL_TH。
2.在 EVM 上,我们可以调整电机转速 (pps) 和加速率 (pps/s)。 这应该是 MCU 处理问题、但在 EVM 上、加速率的按时间分辨率是多少?
3. IC 或环境温度是否影响输出电流精度? 换句话说、 我们能否理解以下规格适用于所有温度范围或仅适用于室温? 
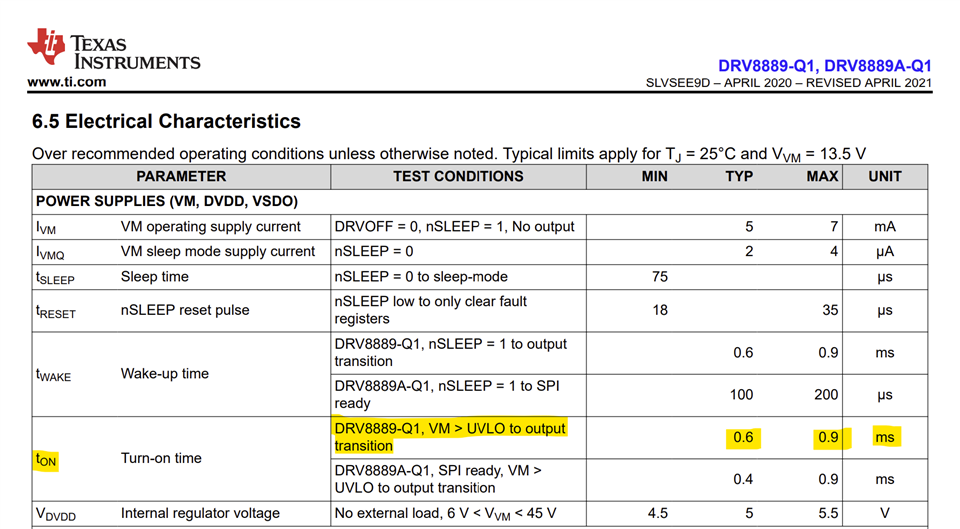
4. VM 大于 4.5 伏后,准备正常运行需要多长时间?
此致、
Yuto