

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:BOOSTXL-DRV8305EVMThread 中讨论的其他器件:MOTORWARE、 LAUNCHXL-F28069M、
工具/软件:
你好
我正在尝试使用 MotorWare(最新版本)启动具有 Launchxl-F28069M 和 BOOSTXL-DRV8305EVM 的 T-MOTOR MN4004-25 300kV BLDC 电机。
运行实验 2c 时、电机在 EST RampUp 和 Ls 状态下似乎稳定且无振动。 识别后、除非以某种特定方式移动和/或处理电机、否则电机运行异常(剧烈振动)、此时电机将再次稳定。 有时振动非常强烈、导致实验室电源上的 OVP 关闭电源。 我已经 使用示波器在 boostxl 上探测了 I_sense A。
A 相电流 (A 相分流电阻器 R4 上的压降。进行放大并发送到 ISENSEA 引脚上的 LaunchPad)、在识别 RampUp 期间: 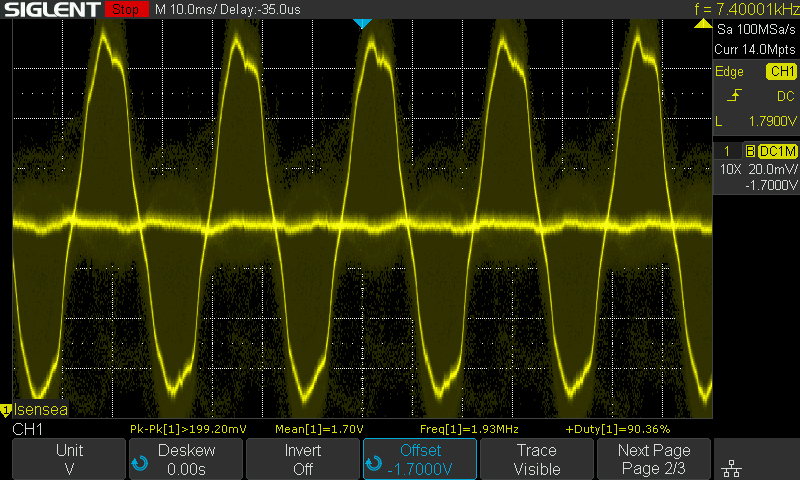
在额定助焊剂期间: 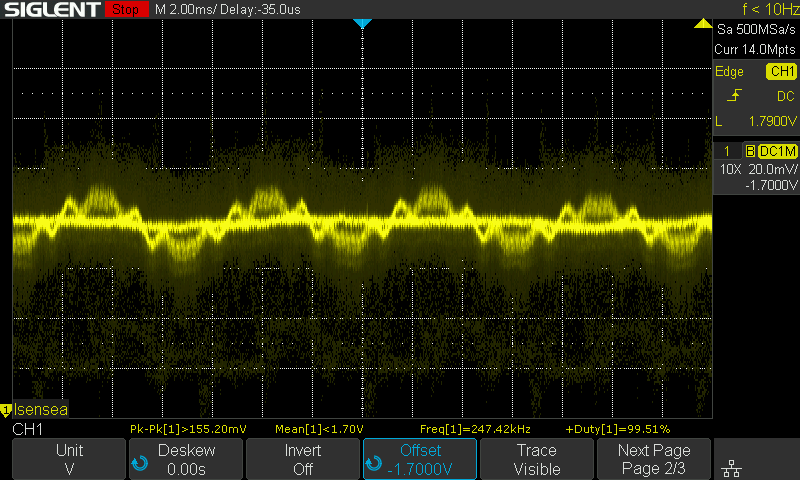
在 Ls 期间: 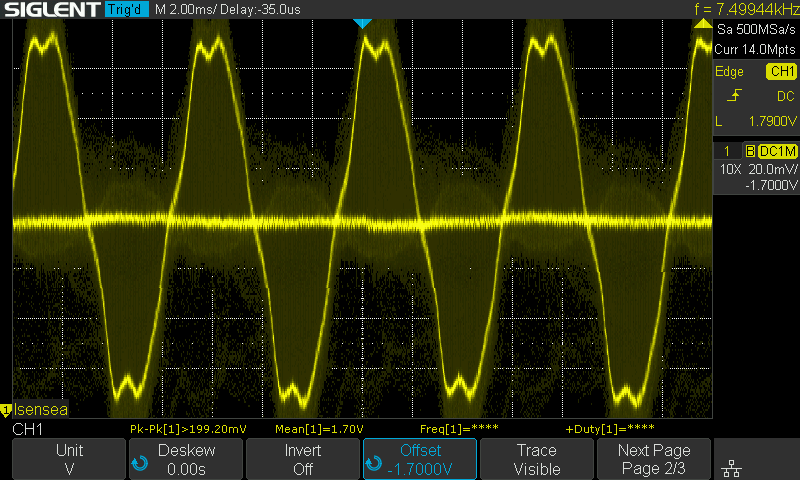
最后一张图更接近我对 BLDC 电机相电流的预期(在该硬件设置的 MATLAB 仿真中很接近)
但是、识别完成后、电机运行时会非常粗糙并过度振动、除非以某种方式旋转或处理(电机轴上有一个不可拆卸的轴承,可能 Cg 变化会对扭矩或速度 PI 控制器产生一定的影响)。 也许也很快?)
识别后和运行粗糙时、电流如下所示: 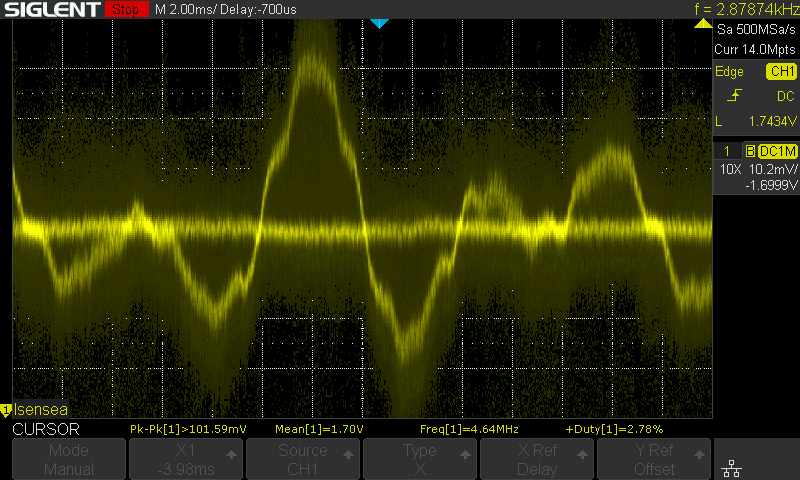
虽然它在 ID 之后平稳运行: 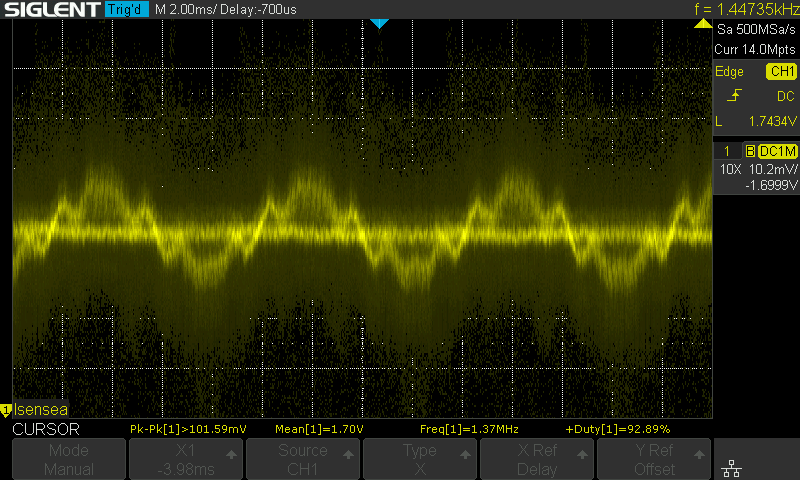
最后两个图也适用于实验 3b:电机以无识别方式运行时。
我认为此问题不会是电机参数问题(为什么在识别后移动 /处理时会平稳运行?) 那么、可能是控制环路(速度 PI 或扭矩 PI)问题还是 FAST 估算器有问题? 我已检查连接。
使用的电机参数:
#elif (USER_MOTOR == TMotor_Antigravity_4004_300kv) #define USER_MOTOR_TYPE MOTOR_Type_Pm #define USER_MOTOR_NUM_POLE_PAIRS (12) #define USER_MOTOR_Rr (NULL) #define USER_MOTOR_Rs (0.2621875555) #define USER_MOTOR_Ls_d (0.000160895237) #define USER_MOTOR_Ls_q (0.000160895237) #define USER_MOTOR_RATED_FLUX (0.00984939188) #define USER_MOTOR_MAGNETIZING_CURRENT (NULL) #define USER_MOTOR_RES_EST_CURRENT (1.0) #define USER_MOTOR_IND_EST_CURRENT (-1.0) #define USER_MOTOR_MAX_CURRENT (4.0) #define USER_MOTOR_FLUX_EST_FREQ_Hz (150)
请注意、我还使用了 EST_FREQ 100Hz 和 120Hz、没有明显差异(100Hz 似乎甚至不稳定)
使用相同电机和硬件套件的其他一些成功工程的电机参数:
https://github.com/open-dynamic-robot-initiative/user_config_f28069m_drv8305/blob/8ab4879222142fd232037e8d2e30d248ecb7b674/user_j1.h
实验 2C 中的识别过程给出的值与上面项目链接中的值非常相似。
对 BOOSTXL-DRV8305EVM 和 LAUNCHXL-F28069M 使用默认硬件值
希望您提供有关如何继续诊断此问题的建议

