请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8889-Q1工具/软件:
您好 TI 团队
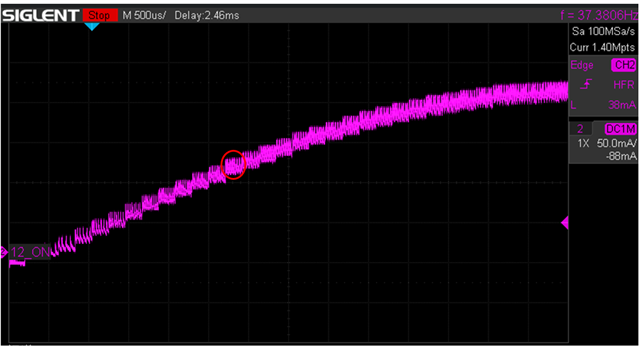
设置 PPS:200
微步进:32
电流:200mA
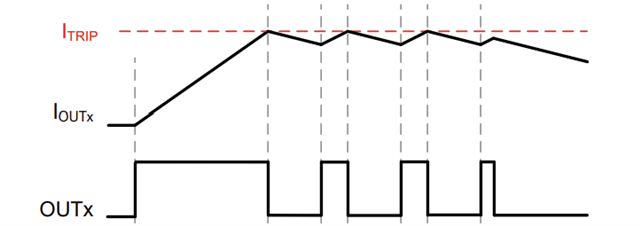
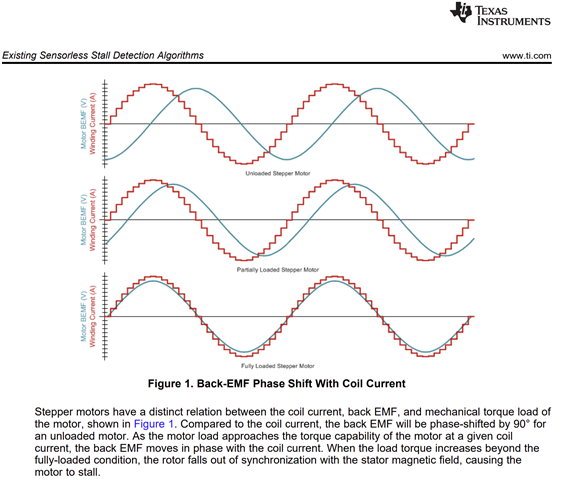
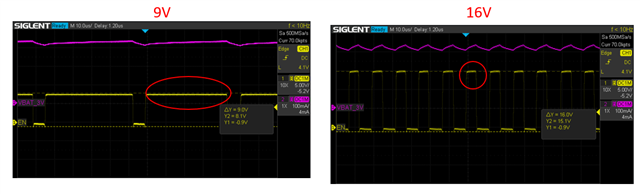
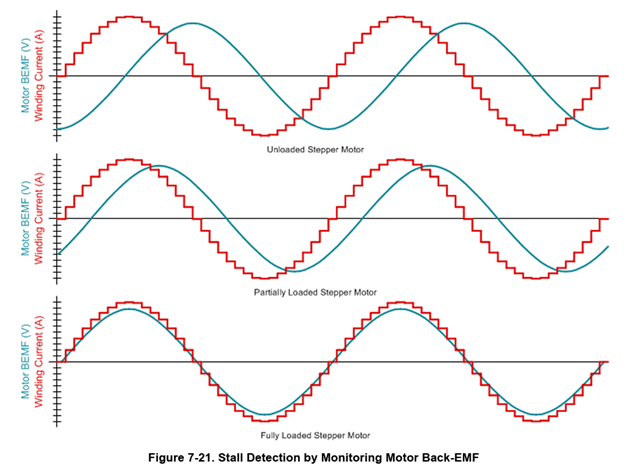
1.测试输出端 AOUUT+并观察输出电流,我发现波形显示每个步骤的各个条(如红色框所示)。 造成这种现象的原因是什么? 如何解释这种现象?
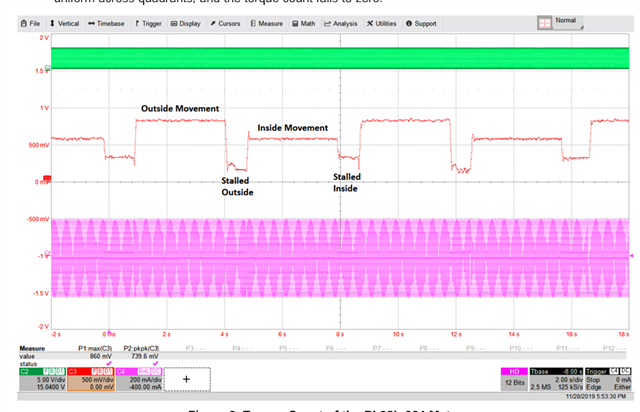
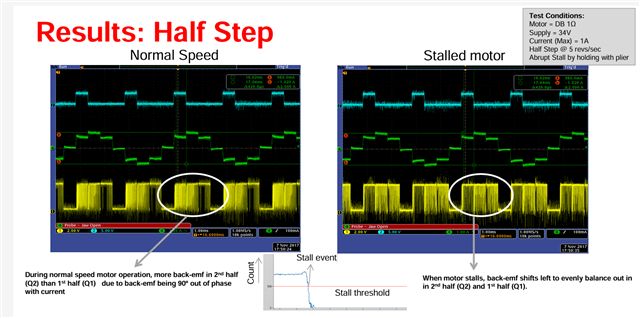
2.当电机运行时,我故意使其失速。 观察输出电压和电流、没有异常。 我该怎么解释?
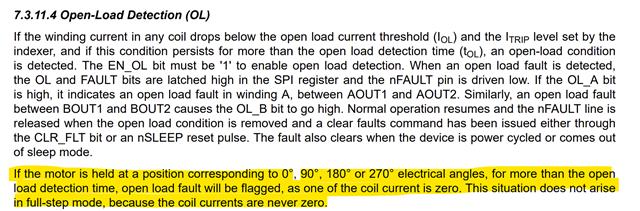
3、操作过程中,如何检测电动机何时因电阻而失速? 除了失速检测方法外、是否还有任何其他参数可用作指示器?