请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8316工具/软件:
大家好!
我们计划使用 DRV8316 来驱动 PWM 频率为 100kHz、24V 的 PMSM、并使用 3x PWM 模式。 目前、我们仍在使用 DRV8316REVM 评估板。
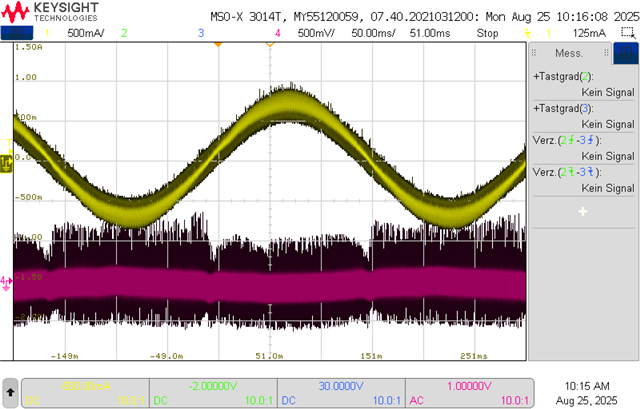
问题是、电流过零附近的相电压失真非常明显。 这进而导致电流失真、这对我们的电机控制器不利。
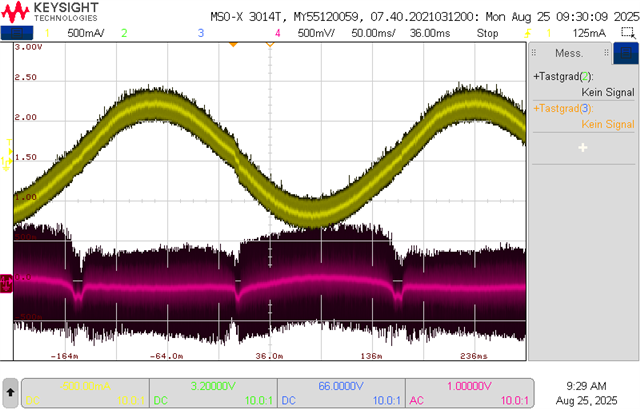
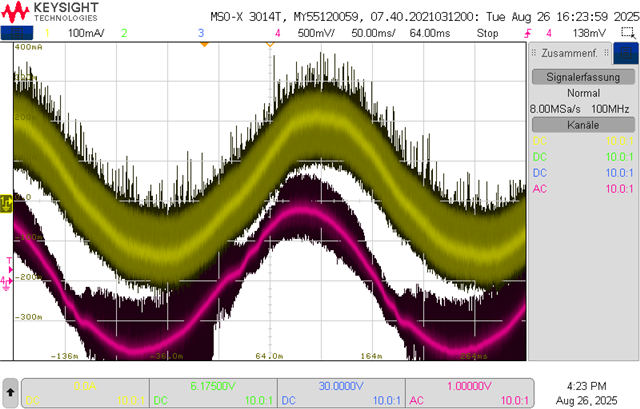
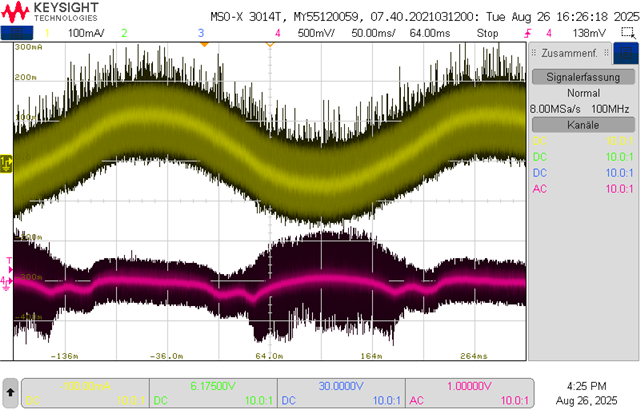
以下屏幕截图显示了开环正弦电压的 A 相电流(CH1,从驱动器流向电机)、以及 OUTA 处相应的低通相电压(CH4、通过 RC 低通和交流耦合):
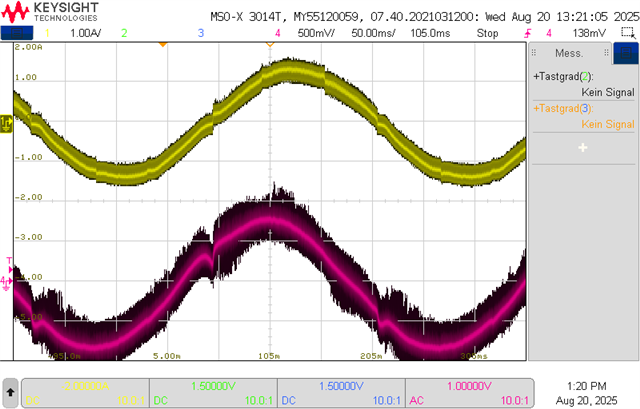
波形看起来类似于“零电流钳位失真“效应。 据我所知、DRV8316 的延迟补偿功能旨在纠正输出占空比的失真、如本应用手册 https://www.ti.com/lit/an/slvaf84/slvaf84.pdf 的最后一章中所述。 不过、我们可以测量到在失真期间 OUTA 的输出占空比小于 INHA 处的输入占空比。
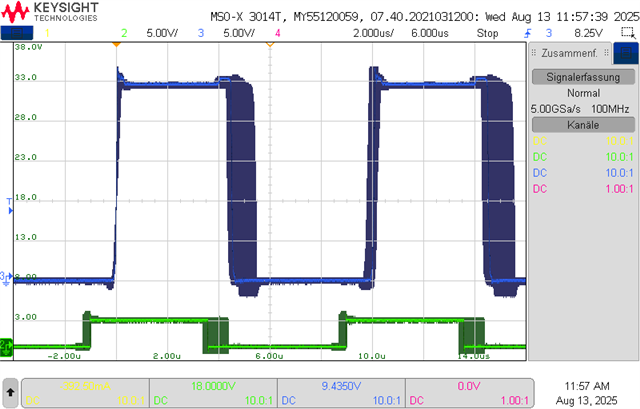
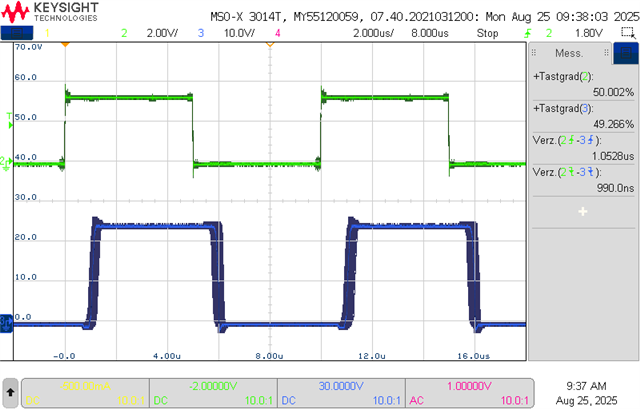
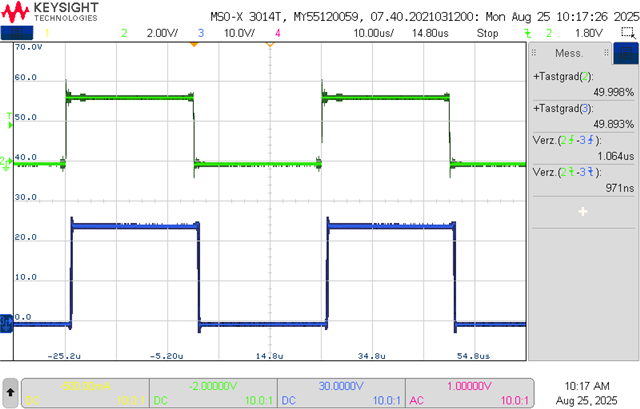
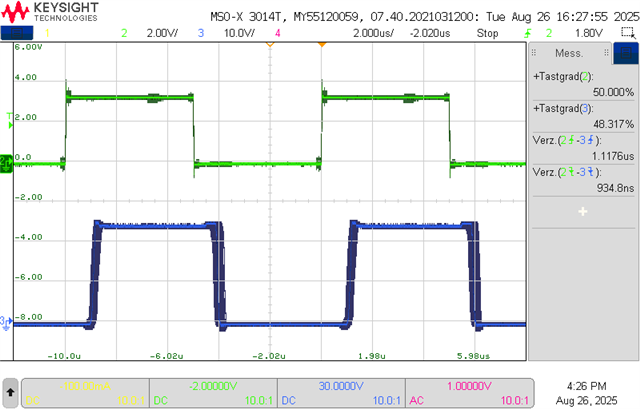
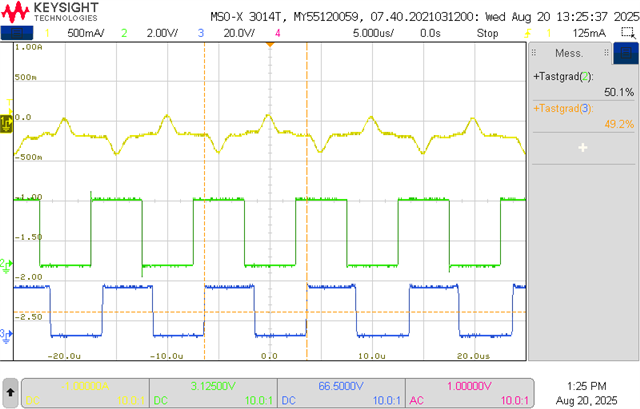
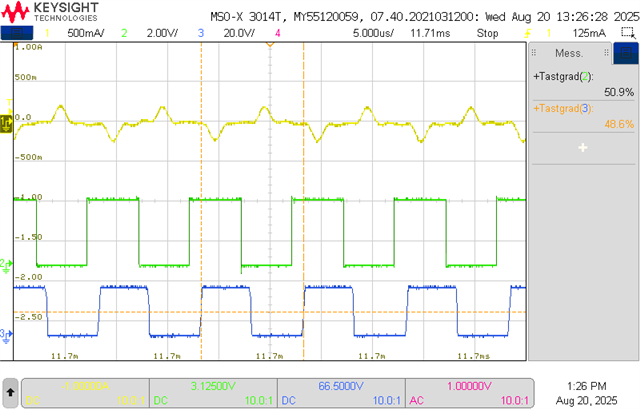
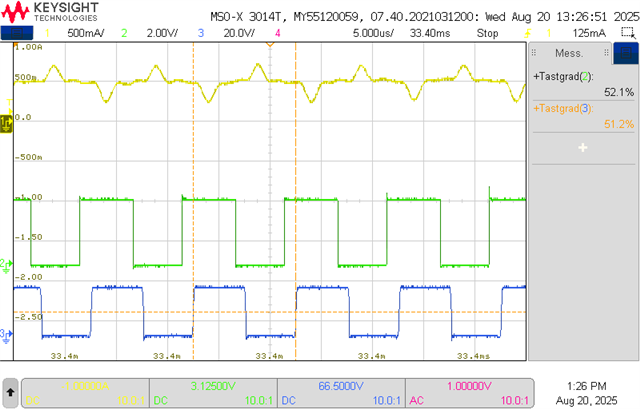
概述 (CH1 电流、CH2 INHA、CH3 OUTA):
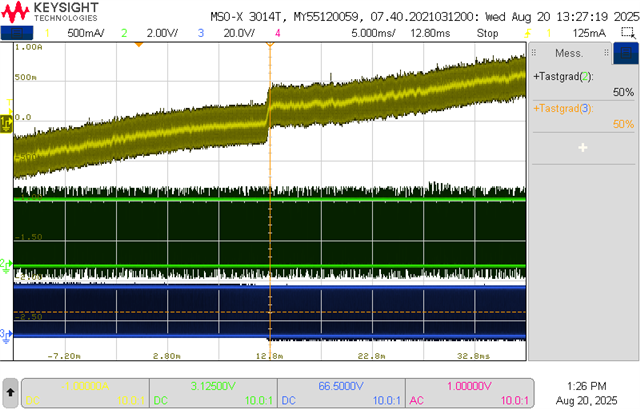
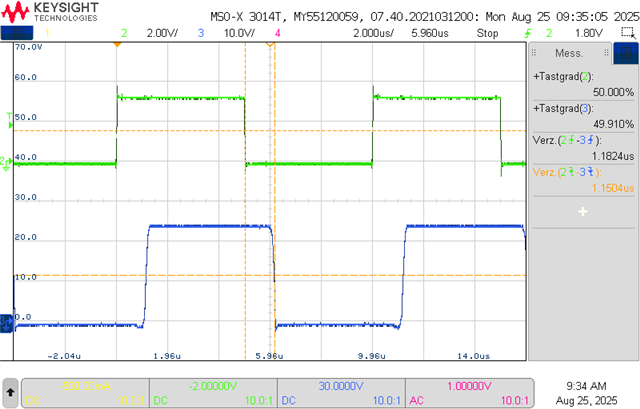
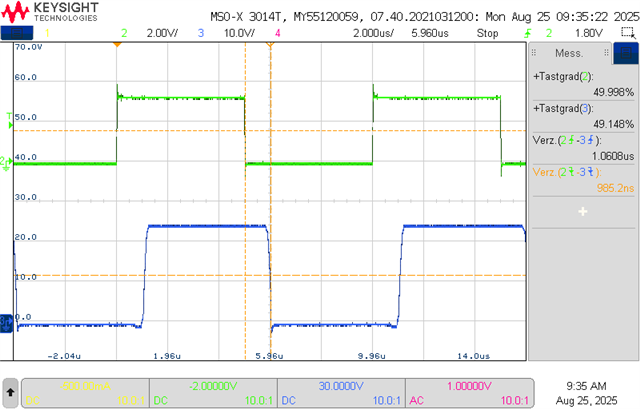
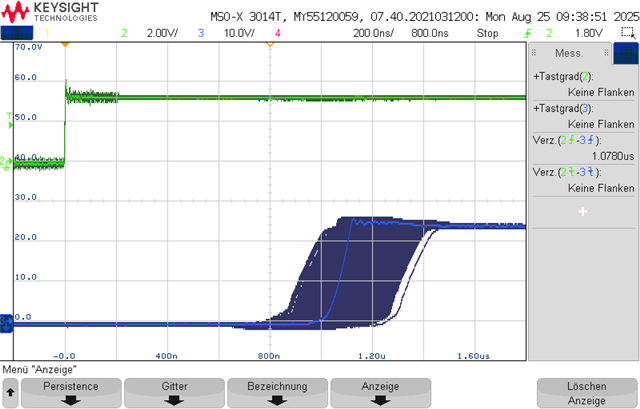
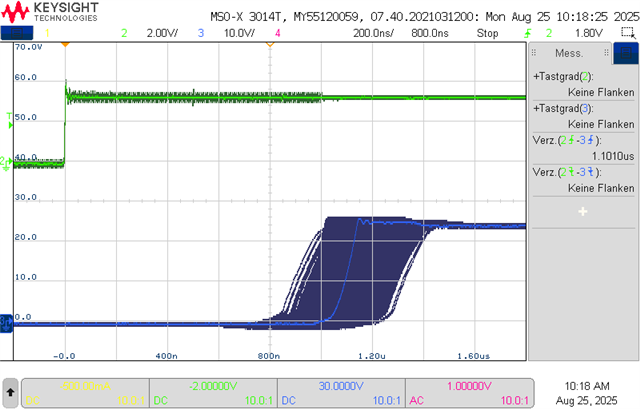
失真之前(占空比降低 0.9%):
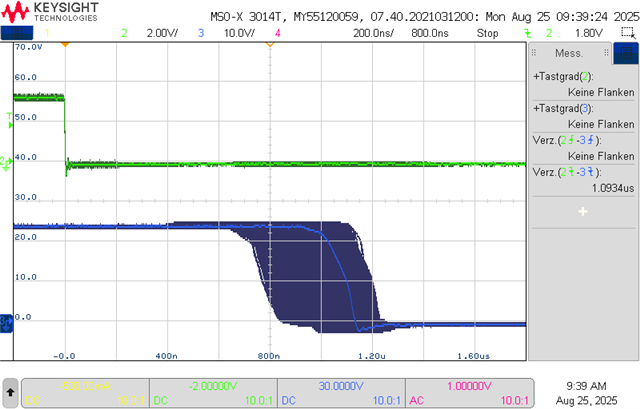
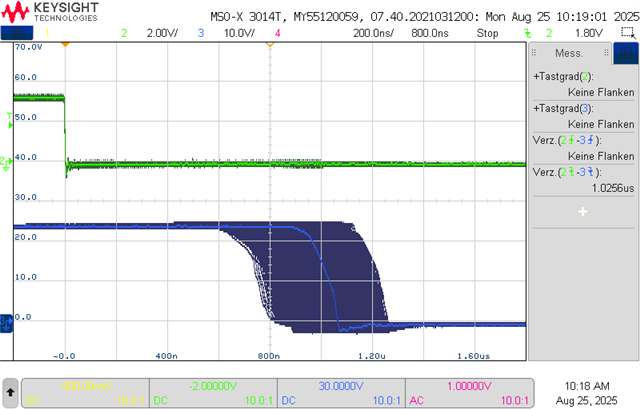
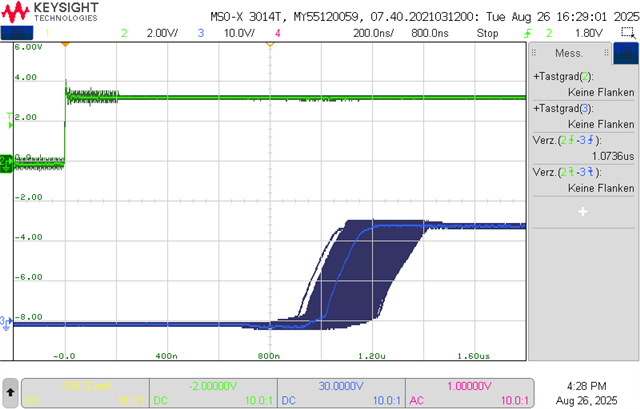
在失真期间(占空比降低 2.3%):
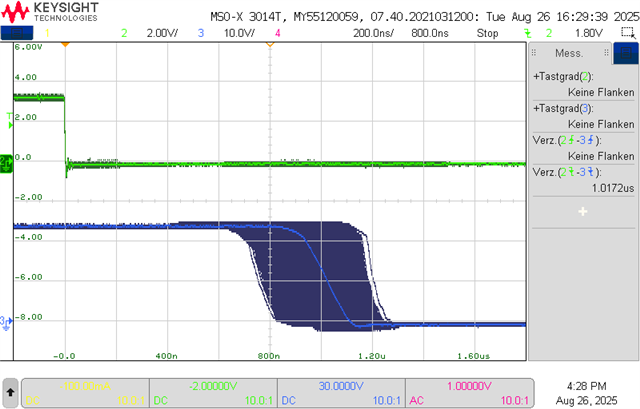
失真之后(占空比降低 0.9%):
相关的 DRV8316 参数:
- 压摆率= 200V/us
- PWM 模式= 3x 模式
- 驱动器延迟补偿=已启用
- 延迟目标= 1.2us
电机参数:
- 相间电阻:1.27 Ω
- 相间电感:123uH
我们还进行了一些实验:
- 降低 PWM 频率:效应在 20kHz 左右消失
- 增加延迟目标:无改进
- 降低延迟目标:在整个波形失真之前增加失真
- 降低压摆率:没有太大差异、最低设置会使整个波形失真
您是否有这种效果的经验、是否有办法防止失真? 您是否同意延迟补偿功能旨在防止失真?
我期待收到您的答复。
此致、Dominik