请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8824-Q1主题中讨论的其他器件:DRV8824、DRV8461、 DRV8434、DRV8436、DRV8452 DRV8424
工具/软件:
- 我正在调试 DRV8824 电路并遇到振荡...我想了解它们的来源。
- 该电路和布局一样根据 DRV8824 数据表进行实现。 我仔细检查了所有零部件的零件号、它们是正确的。 该电路板由 6 层构成、所有布局均符合 L6 上的数据表、L1 上只有四条驱动线路 (AOUT1|2 和 BOUT1|2) 并通过 L6 的过孔进行连接。
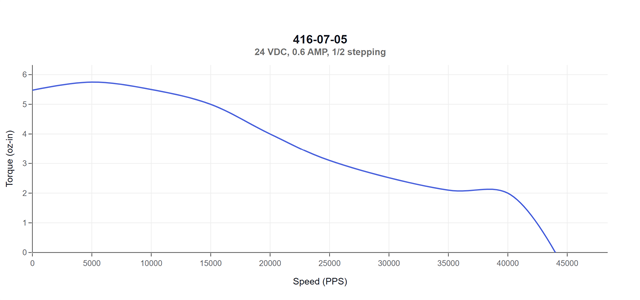
- 电机为 Lin Engineering WD-416-07-05 (0.6A/相、5.4 Ω/相、运行电压为 24V)。 我还尝试了另一台完全不同的供应商提供的电机、具有非常相似的规格、结果是相同的。
- 我观察到的是:
- 当我启用 DRV8824(即半桥打开并看到电机)而无需命令 DRV8824 进行踩踏时、输出 AOUT1|2 BOUT1|2 会发生振荡。 它也会在步进时发生。
- 如果我使用两个 47 Ω 功率电阻器来代替步进电机的两个绕组、如果将电源轨保持在 21V 以下、则避免出现振荡。
- 如果连接任一步进电机、一旦启用 DRV8824、无论是否命令 DRV8824 进行步进、都会在所有经测试的电压 (12V 至 28V) 下产生振荡。
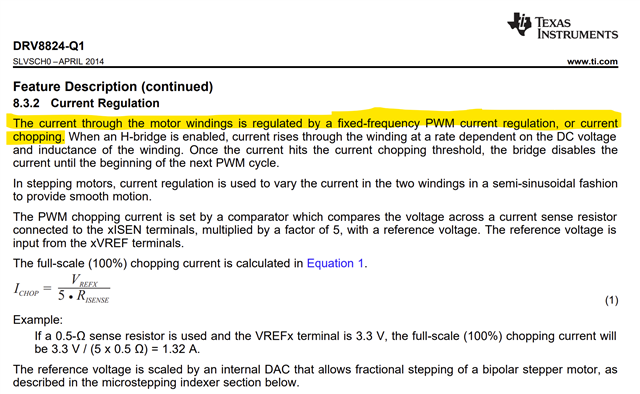
- 我的编程电流设置为 (30k/(10k+30k))*3.3V/(5*0.82 欧姆)= 600mA、AVREF 和 BVREF 已验证为 2.5V。
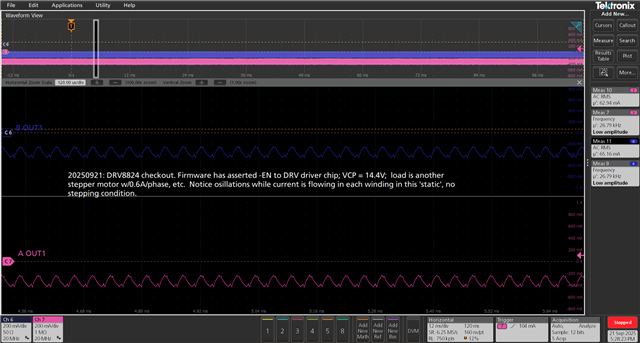
- 当 VMA = VMB = 14.4V 时、在非振荡条件下步进时、V_ISENA 和 V_ISENB 约为 0.24V、远低于 DRV8824 的 xISENSE 跳变电压~0.660mV。 振荡后、ISENSA|B 上的(直流)电压几乎降至零。
- VCP 很满意(例如,14V 电源轨时、为 26V)。
- (电流)振荡使其一直返回到外部电源;也就是说、我看到来自外部 PSU 的电流以与 DRV8824 的输出相同的频率变化、其幅度是单个 DRV8824 输出的两倍。
- 我尝试过的各种事情,没有用处:
- 大容量电容增加到 220uF(从 20uF)--没有变化。
- 使用三个不同的电源(一个线性电源和两个开关)为 14.4V 至 28V 的 VMA 和 VMB 供电、没有变化。
- 通过扭转电源导线到 DRV8824 电路,最大限度地减小了电源的电感 — 没有变化。
- 改变了 DRV8824 与电阻器或电机之间的导线长度--没有变化。
再说一遍、我发现电路中存在振荡、如果电路中选择了合理的元件、即使我不进行步进、也会出现振荡;例如、DRV8824 上的“DC Load“将其驱动至振荡状态。
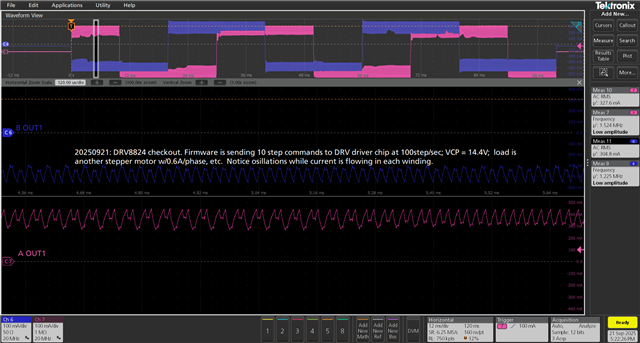
我将在屏幕截图中附加原理图和一组带有描述的屏幕截图。 请注意、“scope 捕获“的右侧有电压和频率测量值。
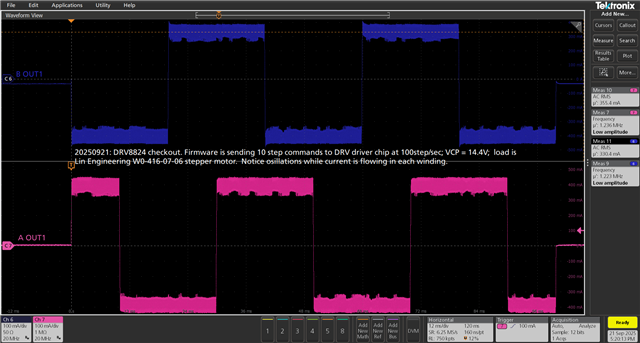
我还会注意到、如果步进真的很慢(例如< 100steps/秒)、电机就能够步进、因为振荡仅在半桥完全启用时发生;相绕组在开关方向上、有足够的电流在静态检测中为绕组通电并执行阶跃。 但以更高的速率实现更快的步进是不可能的。
我很感激能帮助解决这个问题--我很高兴能创建更多的测试方案、捕获更多的探测点等等
谢谢您、
原理图:

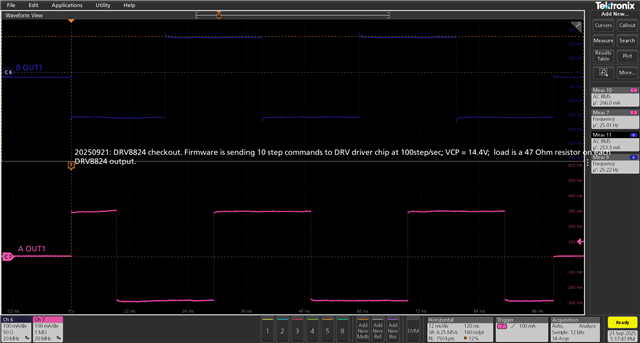
在驱动 47 Ω 电阻器代替步进电机、电源轨= 14.4V 时、DRV8824 不会振荡、以非常慢的速度步进:
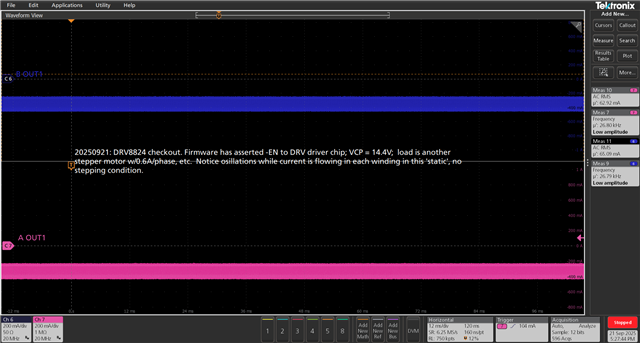
现在、连接步进电机后、电源轨= 14.4V、无步进、DRV8824 输出会振荡:
振荡特写:
低速步进、电源轨= 14.4V、连接步进电机:
有振荡的慢速步进的另一个视图(放大了振荡):