

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号: DRV8300
您好团队
我有几个客户提出的 DRV8300D 应用问题如下。
- MCU PWM 至 DRV8300D INHA/INLA、INHB/INLB、INHC/INLc。
- 是否需要任何 RC 电路? 如果是、 串联电阻和旁路电容器的建议值是多少?
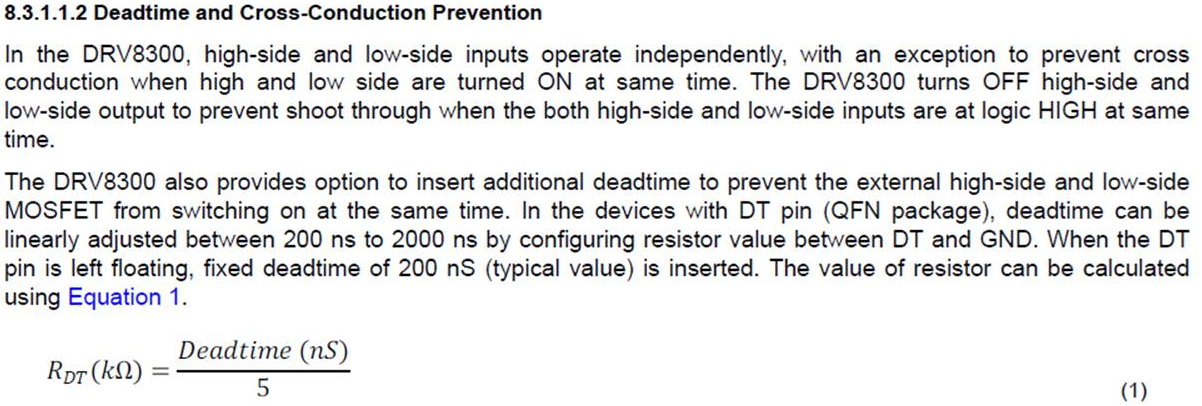
- 死区时间建议值在 200ns 到 2000ns 之间是多少?
- 旁路电容器。 使用相同极性的设计输出有什么优点/缺点?使用反极性的设计输出有什么优点/缺点?
BRS
Brian



