Other Parts Discussed in Thread: DRV8262-Q1, DRV8262, DRV8962-Q1
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号: DRV8262-Q1
主题中讨论的其他器件: DRV8262、 DRV8962-Q1
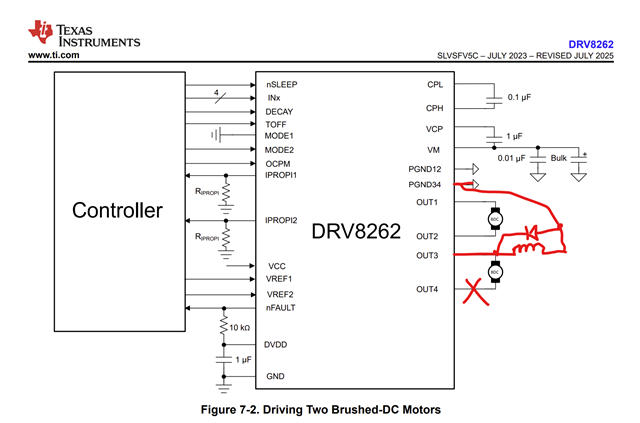
我想使用第二个 H 桥仅使用 OUT3 的输出驱动制动线圈 、并在 IN4 连接到 GND 的情况下通过 IN3 控制开/关、线圈将以 28VDC 从 VM 输入驱动、线圈返回将从 28VDC 电源 RTN 进行容差 PWG34、当从线圈上移除 28VDC 时、我在 OUT3 和 PWG34 之间连接了一个二极管、 我想使用 VREF2 和 IPROPI2 来控制和限制线圈上的电流、这是可行的。 不使用 OUT4 会存在问题。