

Other Parts Discussed in Thread: MCT8316Z
器件型号: MCT8316Z
尊敬的所有人:
在我们开发机电执行器的热忱中、我们遇到了“硬件控制型“MCT8316Z 电机驱动器的另一个问题。 我们的情况如下:
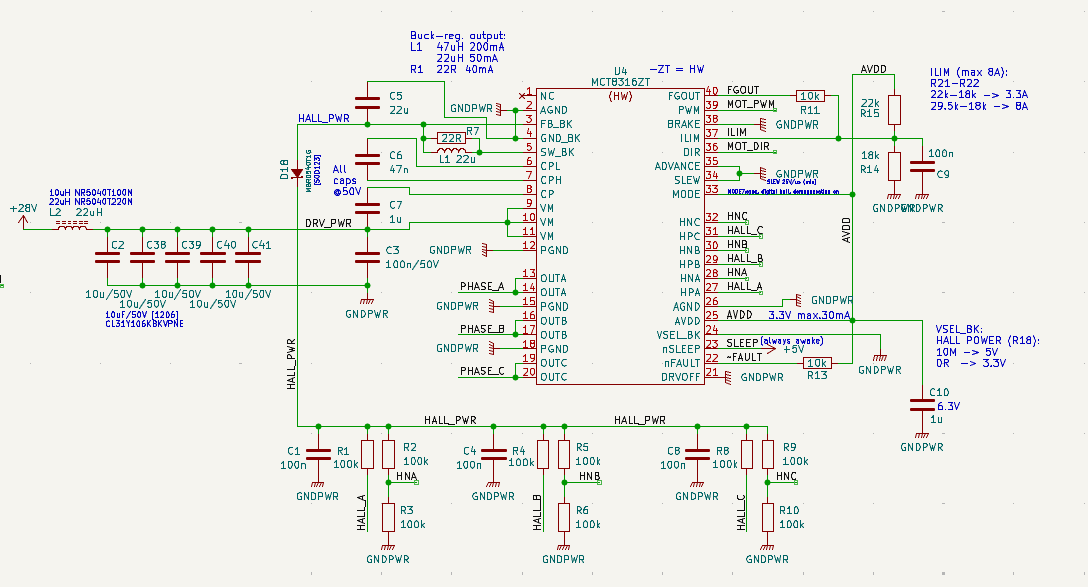
在应用中、我们使用基于 7400 的逻辑来控制驱动器、而要求是使用 BLDC 双向(MOT_DIR 信号)并在达到终端开关时停止(通过控制 PWM 输入、其中 log0 表示停止、log1 表示旋转)。 SLEEP 输入保持高电平、以便驱动器从不睡眠。
基本上、任务是向左和向右旋转电机、并在电机碰到终端开关时停止旋转。
我们遇到的麻烦是、我们的执行器开始移动(电机旋转)在一个方向上明显延迟 (~2s)、而在另一个方向上、开始移动就会立即开始(正确)。

如前所述、我们使用 PWM 和 DIR 信号驱动电机 (SLEEP = 1 以使驱动器从不睡眠。 这似乎也引起问题;似乎有一段时间的唤醒)。 它正常运行的方向是 DIR = 1、当 PWM 上升到 LOG 1 时、电机立即开始旋转。 当我们要求电机以另一种方式旋转时、就会出现故障。 我们设置 DIR = 0 并同时设置 PWM = 1、而人们期望电机开始旋转、但直到延迟一段时间(主要是大约 2s)后才开始旋转。 但并不是一直发生 (~40-60%。 基本上是随机的)。
我注意到有一个故障指示,清除后电机立即开始旋转 — 如上面的时序图所示。
因为数据表[ https://www.ti.com/lit/ds/symlink/mct8316z.pdf]上对这些信号进行计时没有任何说明 问题是造成延误的原因是什么以及如何避免这种延误? 如果它是 UC 控制的,我会尝试延迟一段时间的 PWM 信号,但在当前设置与基于 NAND 的控制是不可能的:|如何解决这个问题?
非常感谢您提前提供的见解、技巧或提示!  μ s
μ s
Josef

