Other Parts Discussed in Thread: DRV8873
器件型号: DRV8873
大家好:
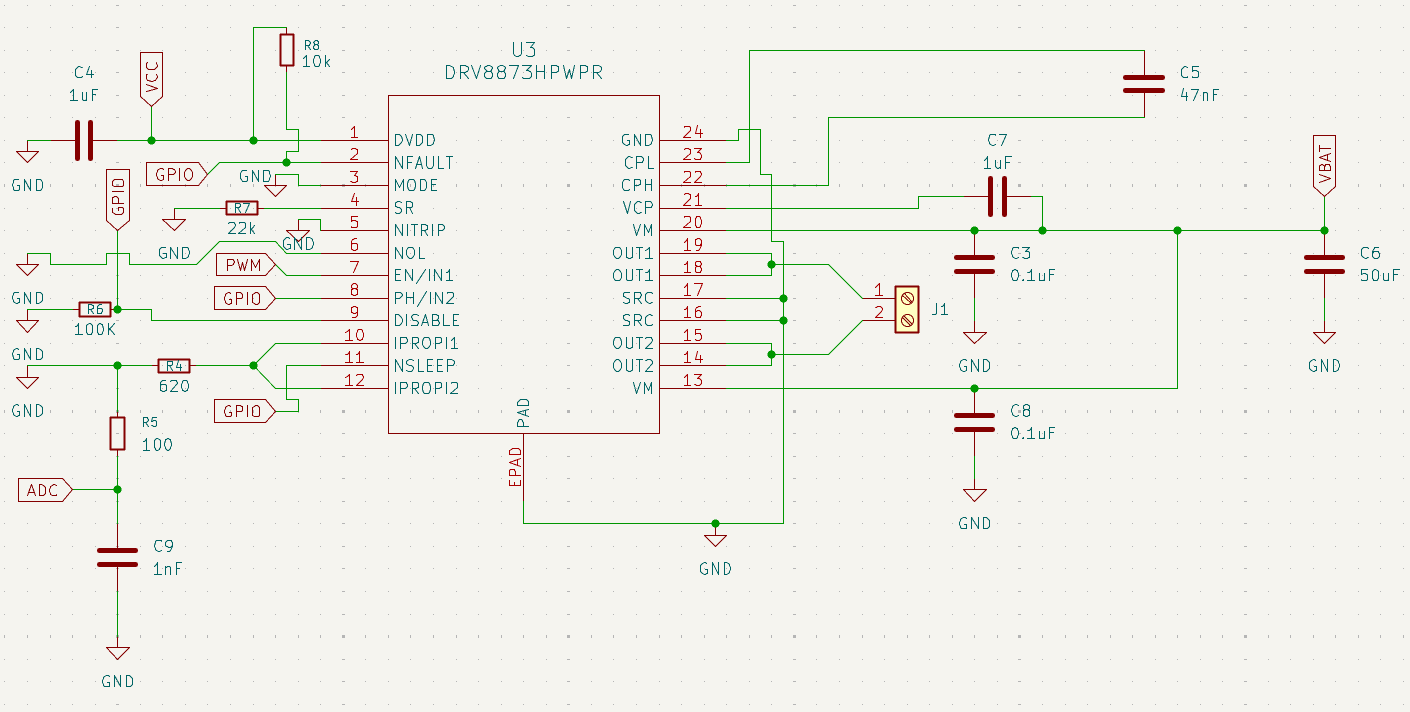
我目前正在使用设计一款紧凑、高性能的移动机器人 DRV8873 (DRV8873HPWPR) 指定 硬件模式 以驱动 A 单路有刷直流电机 由 A 供电 7V 至 12V 电池 (VM) 。 电机驱动器由控制 STM32F103C8T6(3.3V 逻辑) 主要目标是 在动态负载条件下实现快速加速、强制动和稳健性 。
在我的设计中:
-
VM(引脚 13 和 20) 由电池与本地电源供电 每个 VM 引脚上的 0.1 µF 陶瓷电容器 加 A 大容量电容器 (50 µF) 放置在靠近器件的位置、这是数据表中建议的。
-
DVDD(引脚 1) 由 MCU 供电 3.3V 电源轨 与 A 去耦 1 µF 电容器 电流路径。
-
。 电荷泵引脚 (CPH、CPL、VCP) 根据数据表使用进行连接 47nF (CPH–CPL) 和 1 µF (VCP–VM) 接地端。
-
。 外露散热焊盘 (EPAD) 以及所有 GND 引脚 连接到实心接地层。
-
我正在使用的器件 IPROPI1/IPROPI2 来监控电机电流。 A 620 Ω 检测电阻 将 IPROPI 电流转换为电压、然后转换为 RC 滤波器 (100 Ω/1nF) 在向 STM32 馈送 ADC 输入之前。
-
消耗量 节点 GND 可选择硬件控制模式。
-
NOL 节点 GND 以在上电时启用开路负载诊断。
-
NFAULT 通过上拉至 DVDD 10k Ω 连接到 GPIO 进行故障监控。
-
SR(压摆率) 使用接地电阻设置该电阻、以平衡 EMI 和开关性能。
我希望能对进行回顾 电源引脚、控制引脚配置和 IPROPI 电流检测网络 、并确认该原理图遵循了 TI 针对 DRV8873 在此类应用中的推荐做法。 欢迎提供有关稳健性、EMI 注意事项或改进方面的任何反馈。
提前感谢您的支持。