请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:DRV8316 “线程: 测试”中讨论的其它部件,
运行校准程序时,DRV8316输出似乎与输入占空比不匹配。
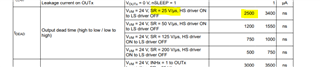
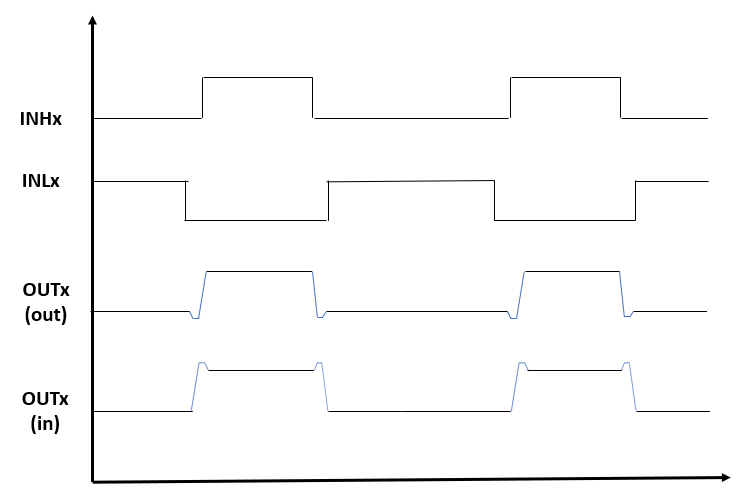
我正在使用6x PWM (不是电流限制模式);我已通过 SPI 配置设备,当前的默认值不是 OCP_dg (0x2:1.1 us)和 OCP_LVL (0x1:24A)。 我的 PWM 为20kHz,根据数据表中列出的标称停机时间,HA/LA 之间的停机时间为500ns。 (请注意,缺省情况下 AAR 和 ASR 处于关闭状态)
为了校准相电阻,我使用简单的 PI 回路强制设定电流量(3A)通过特定电动机相1秒钟,并根据请求的调制记录估计相电压。 电流正确,测量电流为2.95A;但是,PI 控制器应用于达到该电平的 PWM 占空比意味着比电动机相上的实际调制要高得多。
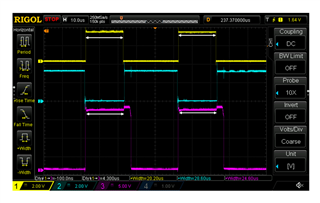
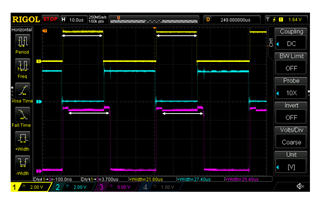
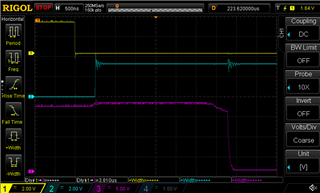
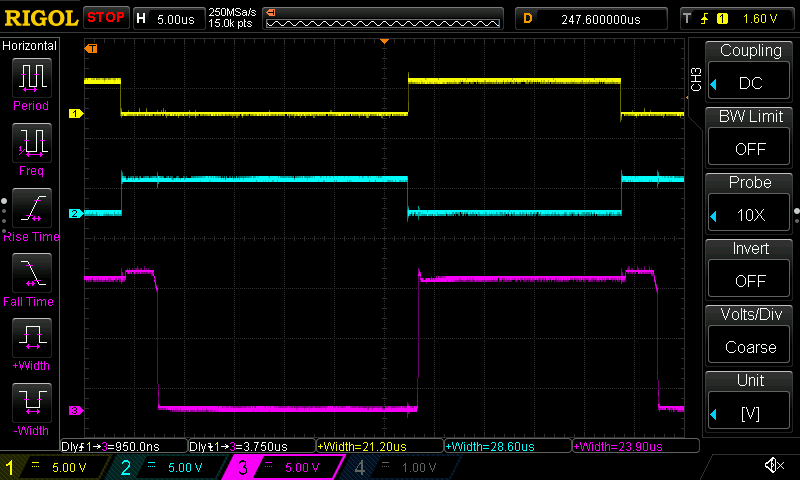
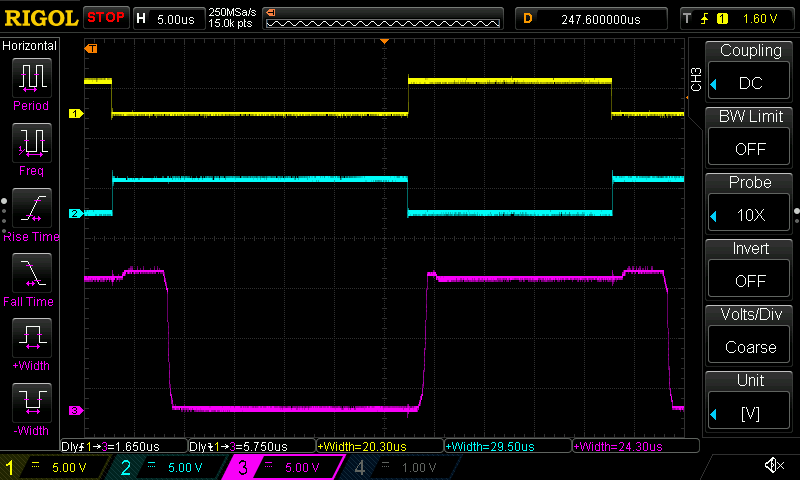
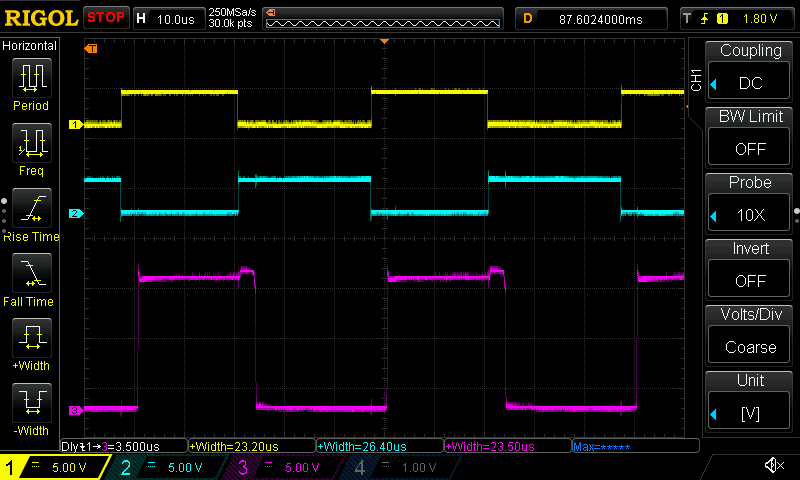
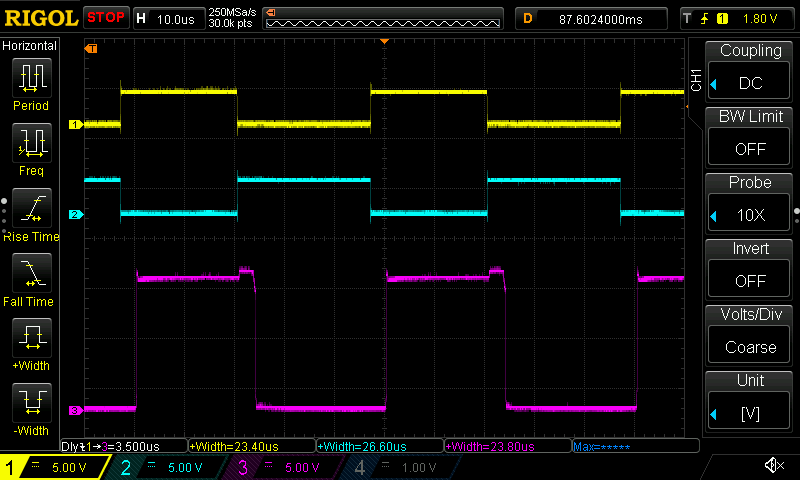
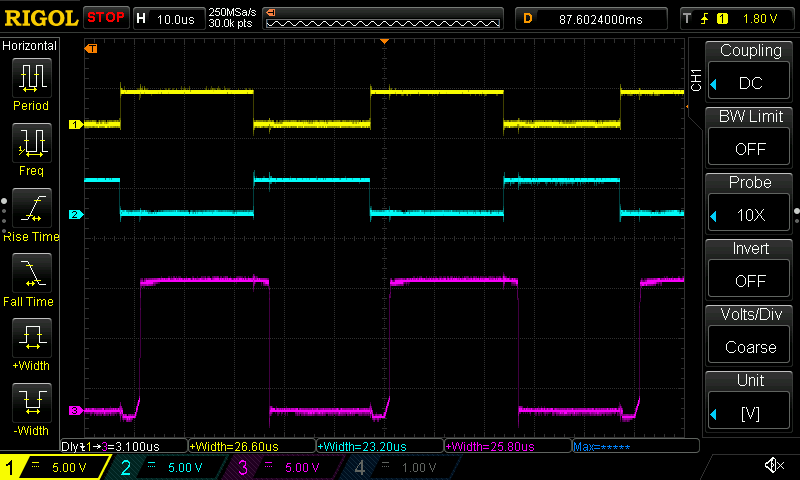
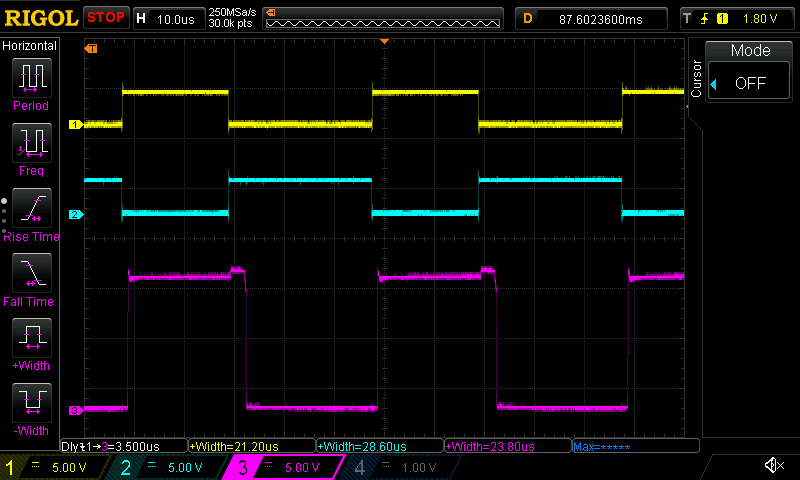
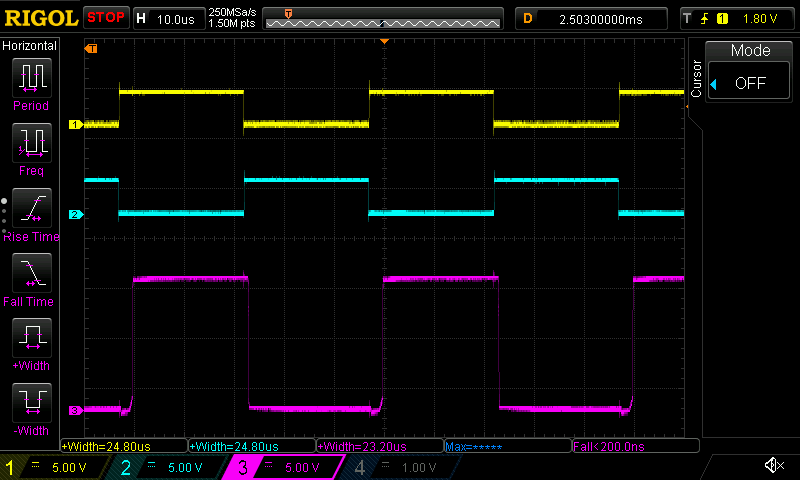
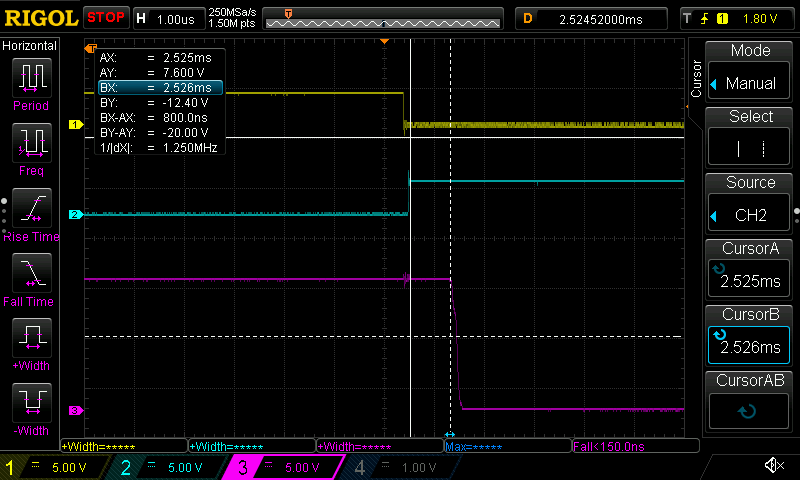
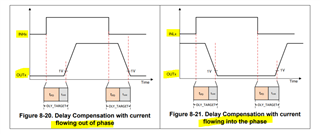
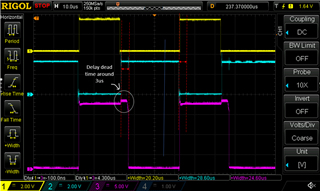
我尝试使用驱动器延迟补偿来使输出占空比更接近 PWM 输入,它确实可以减少占空比失真。 但是,即使使用3.2 us 的最高延迟目标(0xF),输出仍会严重失真,导致校准明显不同于预期。
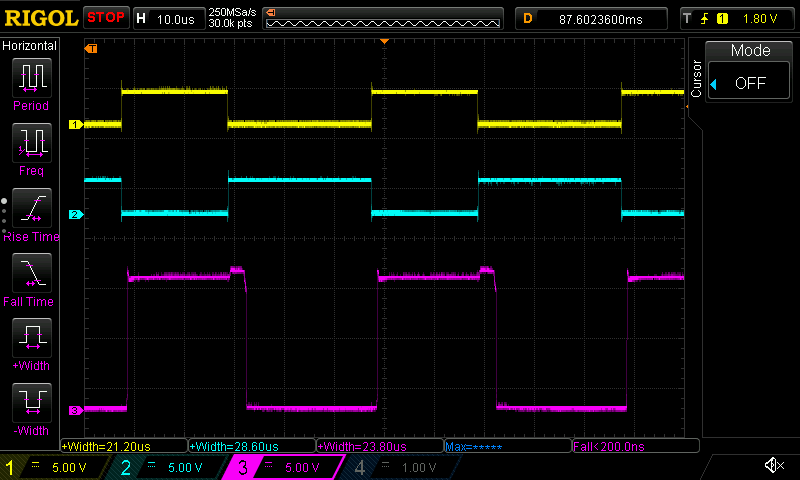
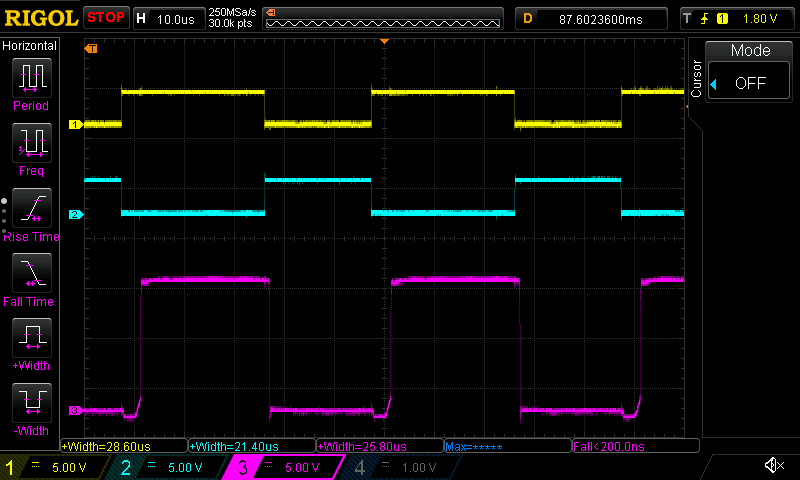
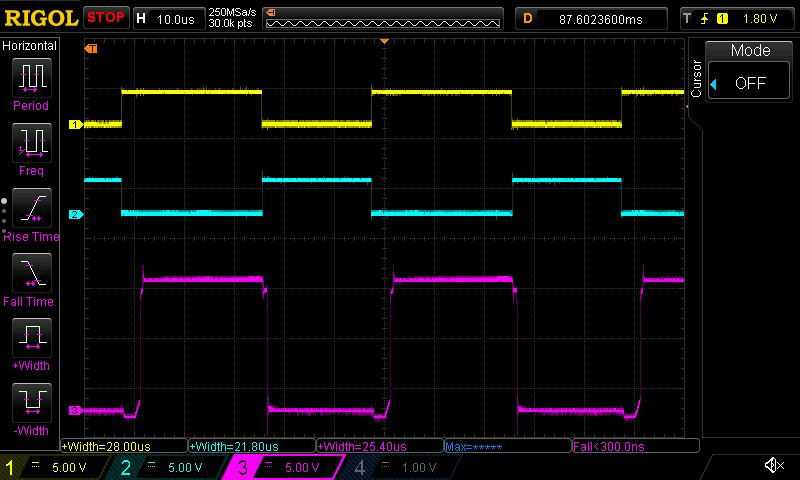
我附上了一些示波器轨迹的拉链,其中显示了延迟和占空比失真。 如果有人对我如何使应用占空比更准确地与输入 PWM 类似有任何想法,我会非常感激!
谢谢,
埃里克