您好,
我们正在将DRV8711驱动器IC用于此步进电机的应用中:Nanotec ST8918M6708 (6708 (https://de.nanotec.com/produkte/566-st8918-schrittmotor-nema-34/)。
原理图与评估板上的原理图几乎相同,仅使用了其他FET。 我们使用CSD1.9532万QB5 (http://www.ti.com/lit/ds/symlink/csd1.9532万q5b.pdf)。 电源为48V
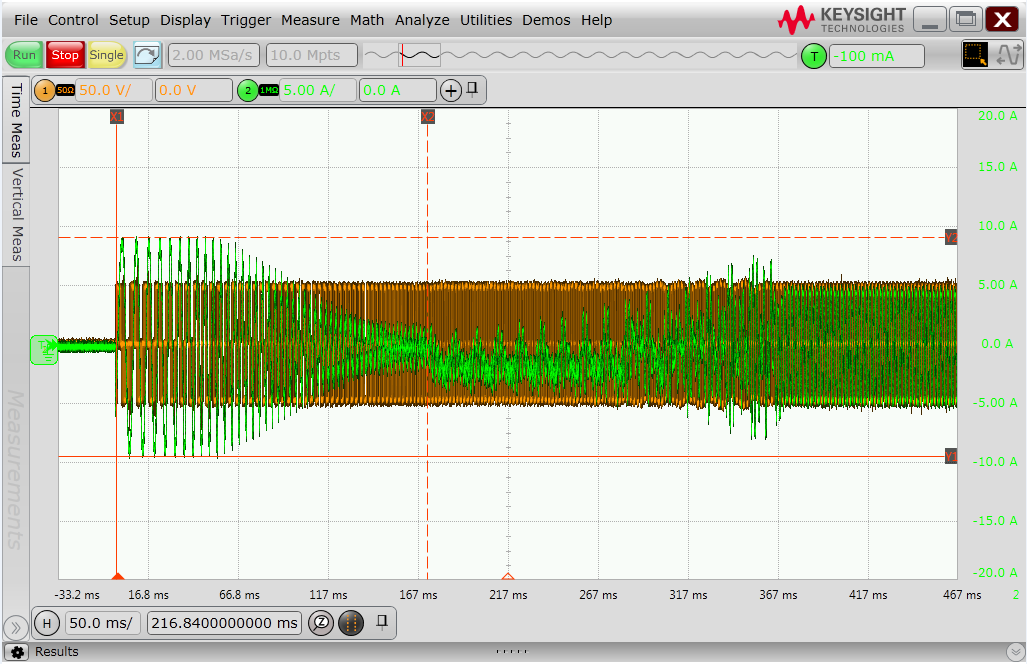
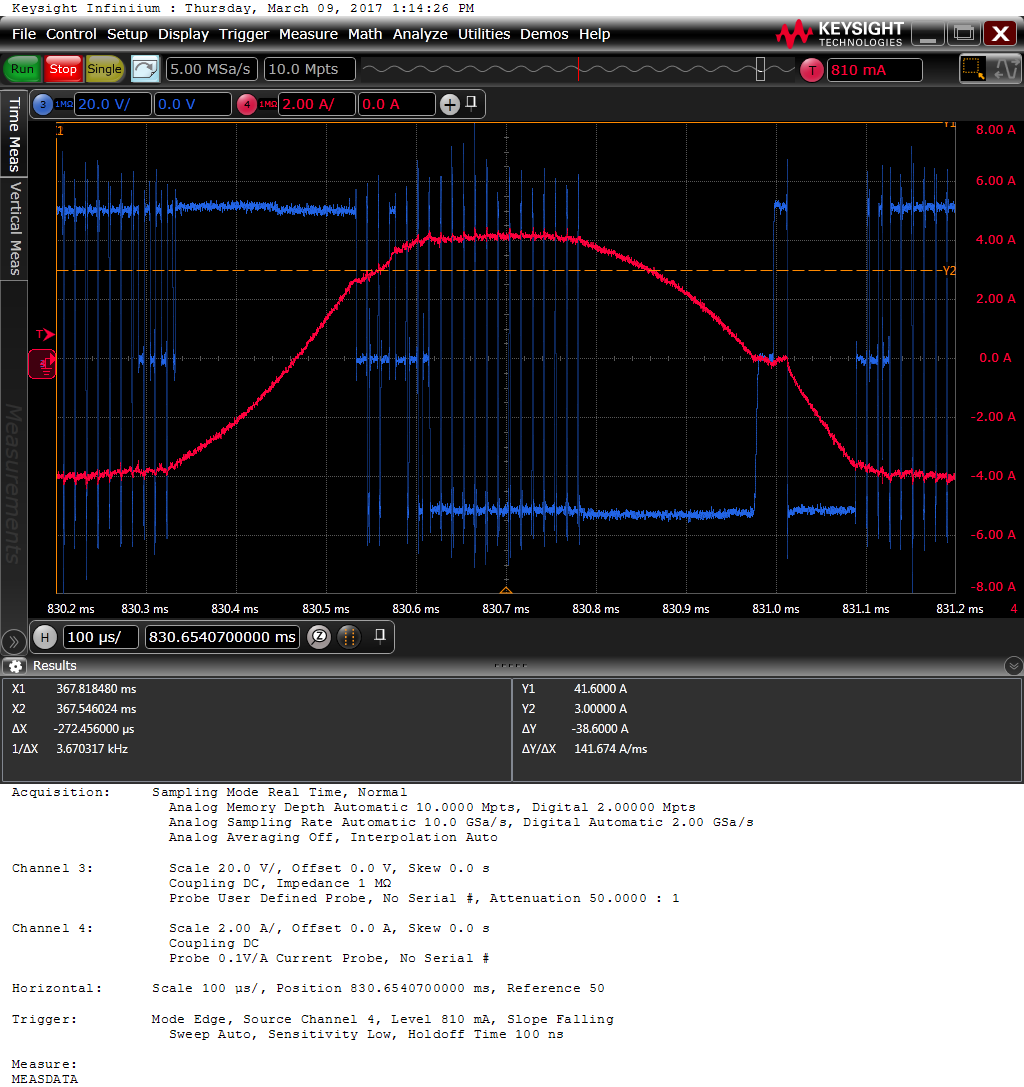
电动机的运行时间指定为2100 /分钟,但当我们达到大约1200 /分钟时,电流调节无法将电流保持在所需的值上,然后过电流保护会停止驱动器。 您可以在此处看到何时发生这种情况:
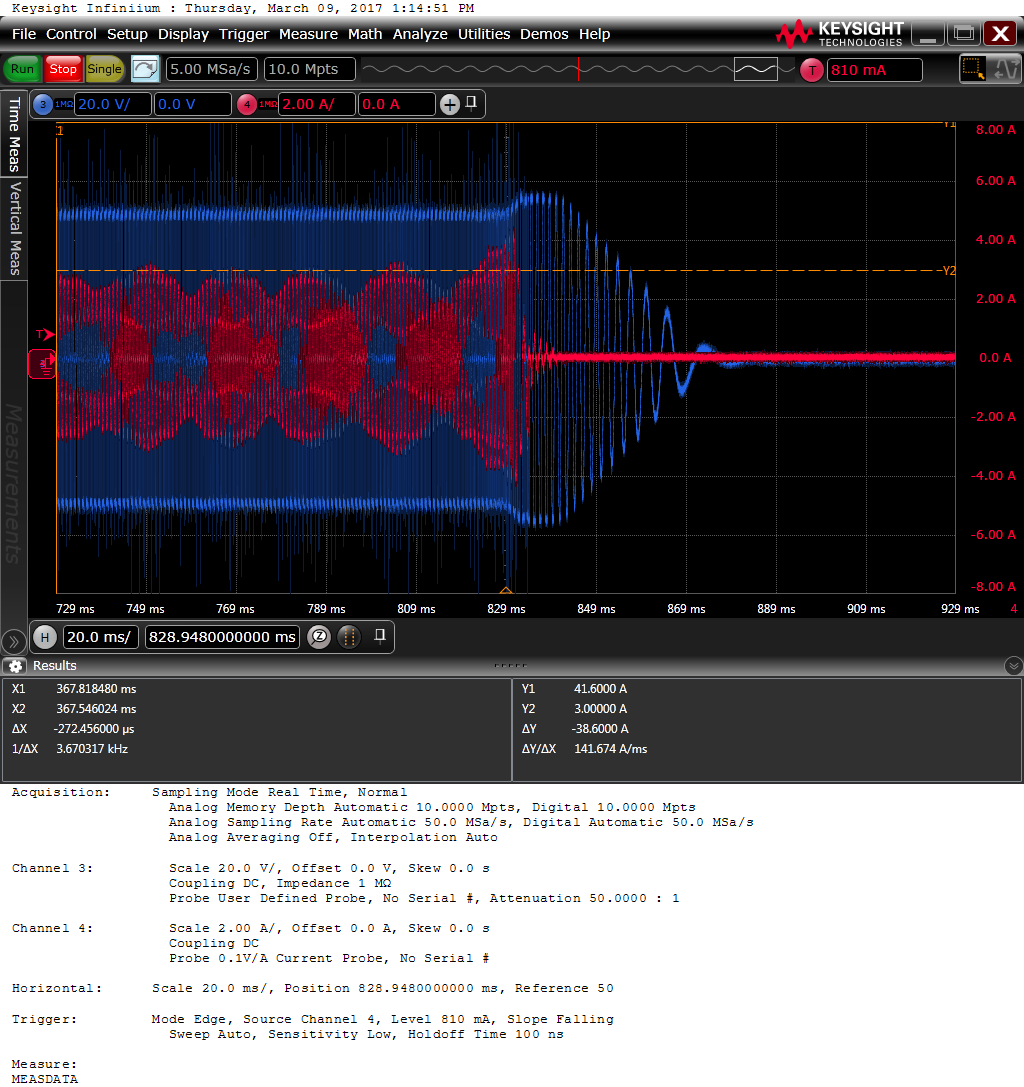
详细说明:所需电流为2.6A (橙色线),但慢速和快速衰减都不能降低电流。
要配置驱动程序,请执行以下操作:
步进驱动器.Ctrl ||步进控制器_ENBL;
步进驱动程序.Ctrl ||步进控制_EXSTALL;
步进.驱动程序.Ctrl ||步进_CTRL_MODE_Half_step;
步进.驱动程序.Ctrl ||步进_CTRL_ISGAIN_20;
步进.驱动程序.Ctrl ||步进_CTRL_DTIME_450;
步进驱动器扭矩||扭矩;
步进驱动器扭矩||步进扭矩_SMPLTH_50;
步进驱动器关|=20;
步进驱动器空白|=50;
步进驱动器衰减|=100;
步进.驱动程序.衰减||步进_衰减_DECMOD_All_Auto;
步进驱动器失速|=60;
步进.驱动程序.步进||步进_步进_步进_SDCNT_4;
步进.驱动程序.步进||步进_步进_步进_VDIF_8;
步进驱动器驱动器|=步进驱动器OCPTH_500;
步进驱动器驱动器|=步进驱动器OCPDEG_2;
步进驱动器驱动器|=步进驱动器TDRIVEN_250;
步进驱动器驱动器|=步进驱动器TDRIVEP_250;
步进驱动器驱动器|=步进驱动器IDRIVEN_300;
步进驱动器驱动器|=步进驱动器IDRIVEP_200;
我测试了所有衰减模式并修改了所有其他设置,但结果始终相同。 当达到特定的转速值(最大值约为1200/min)时,会发生这种情况。
是否有人知道我做错了什么?
谢谢,
Christoph