请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:DRV8825 主题中讨论的其他部件: DRV8880, DRV8886AT, DRV8886ATEVM
我正在设计一个定制控制器板,用于控制望远镜底座上的步进器。 对于我的初始原型(版本A),我使用了两个Pololu DRV8825步进电机驱动器载板,插入到自定义板设计中。 该原型驱动两个1.5A NEMA 17双极步进器,工作非常好。
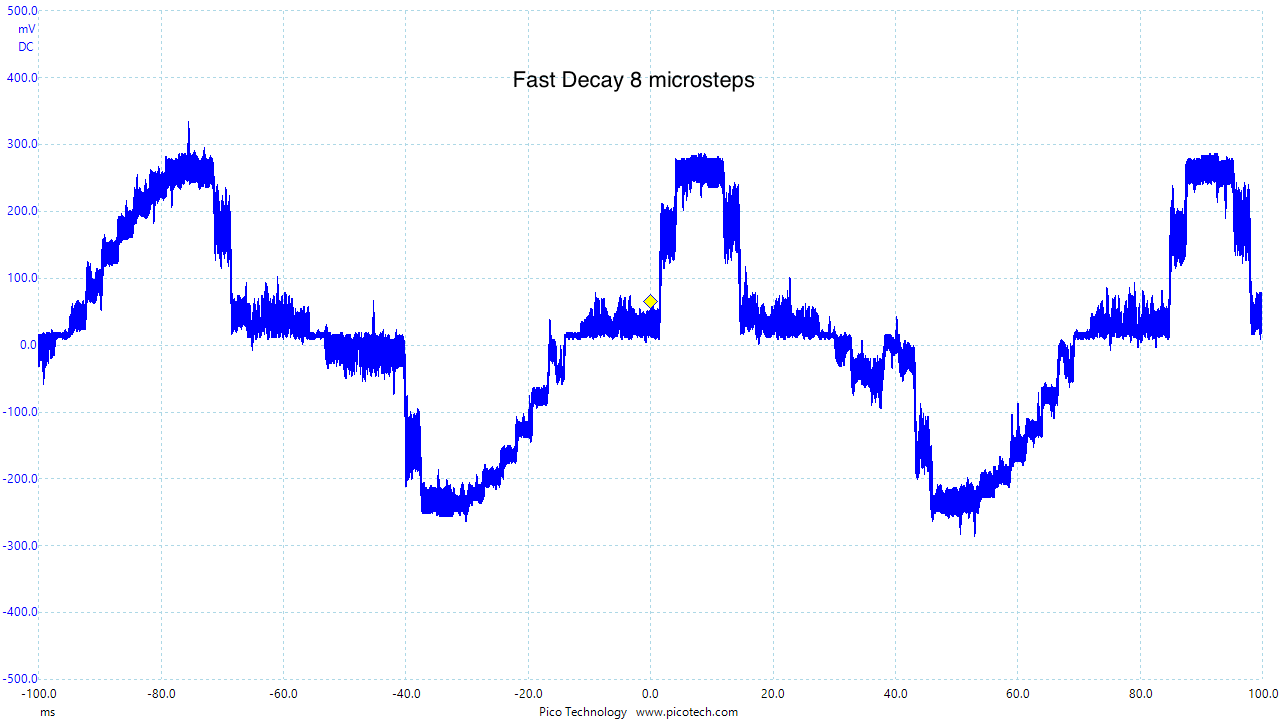
我使用直接安装在主板上的三个DRV8825设备设计了第二块板(B版),并且我在所有三个电机上都遇到了不稳定的运动,并且看到电流波形出现了一些严重的不规则现象,如下所示。 此轨迹是在步进模式下以40Hz的步进速率捕获到单个NEMA 17步进器的。 Rev A系统的相应轨迹看起来良好。

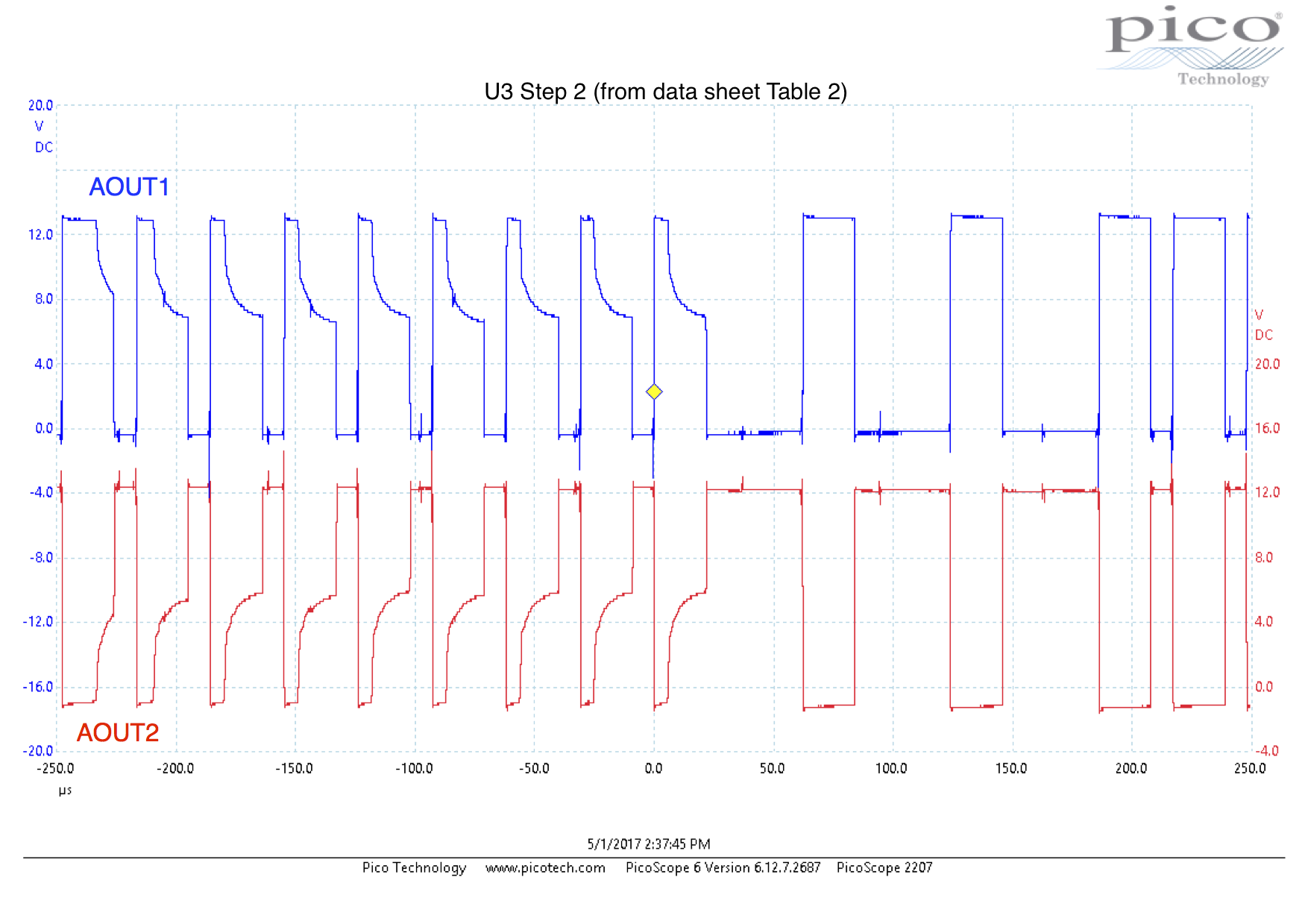
在进一步研究该问题时,我还看到A和B输出的PWM波形出现严重不规则现象,如下所示。 同样,来自Rev A系统的相应迹线看起来正常。

版本B设计的详细信息如下:
- 三个DRV8825设备由PIC18F46K20微处理器控制
- 两个NEMA 17 2.0A双极步进电机,相电阻1.4 欧姆,相电感3.0 MH
- 一个NEMA 1.167万mA双极步进电机
- 12伏电源(相同的电源在Rev A板上成功使用)
- 衰减设置为快速衰减。
- 我使用模具,焊膏和热板对所有组件进行回流焊接,使用IR温度计监控板温度。
- 示意图和布局如下所示
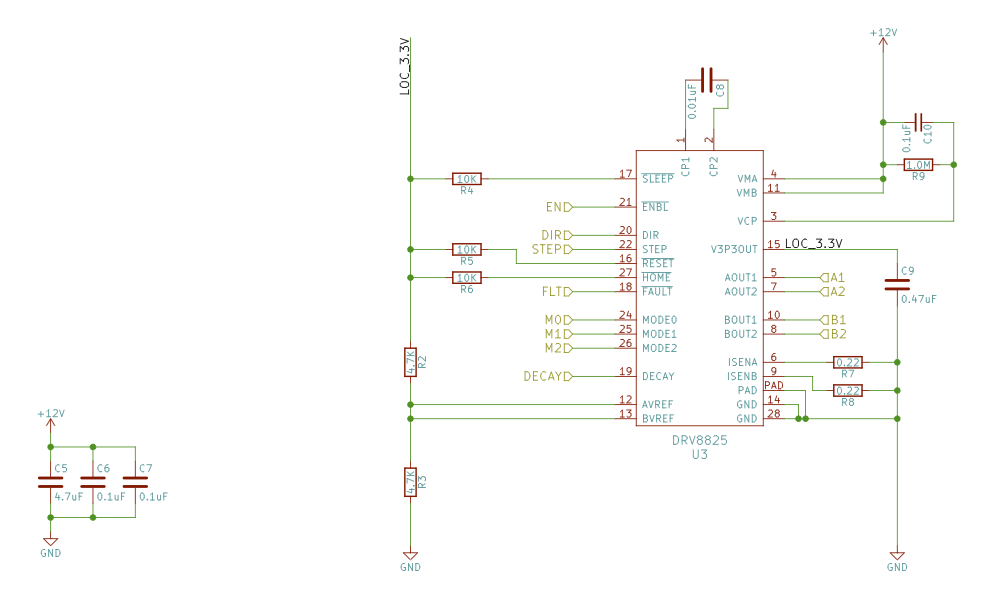
测试的主板与此原理图的不同之处如下:
- 电阻器R4和R5连接到主板3.3V净电压,而不是DRV8825的本地3.3V电压。 这是通过切割轨迹和添加一根导线实现的。
- 电阻器R7和R8现在为0.1 欧姆0.5W。 原始电阻器的额定功率不足。
- 在该设备上添加了100mF 35V电解电容器。 最初的设计是为整个板使用单个散装电容器。

我意识到大部分布局都不符合建议。 在阅读了本论坛上大部分与DRV8825相关的帖子后,我意识到这里需要做出很大的改变。 以前我没有看过EVM,因此我将在下一版本中将其用作模型
我在主板上测试了所有三个DRV8825,它们都显示了这种现象。 过去有人见过这样的吗? 此处的信息中是否有任何可能的原因? 无论如何,我都将重新设计主板,但我想先了解是什么导致了这种情况。 我唯一的理论是我的焊料回流方法导致设备过热并损坏。 但我认为这三个设备都不可能以同样的方式损坏。