

您好,TI团队:
我指的是slyt482.pdf的应用说明表Jose I. Quinones。
如果我必须驱动步进电机进行位置控制。 与车载仪表组内的仪表板一样,使用按速度表值移动。
1>所以我的问题是,它将是步进电机的位置控制应用。 对吗?
2>如果假设PWM寄存器为8位,则我可以将完整的360度正弦波周期分为256微步。
但是,如果我在整个360度循环中使用48或24个微步,则不是使用256微步/全360度循环。
a>对于每个完整360度循环48个步骤,每个完整步长将有48/4 = 12微步长,即1微步长= 1/12全步长。
B>对于每个360度全循环24个步长,每个全步长为24/4 = 6微步长,即1微步长= 1/6全步长。
3>根据应用说明"位置控制"一节"另一个可能导致更少调整的选项是将总步数细分为 分配给加速/减速配置文件中每个特定区域的百分比",如果我必须从每小时10英里的速度表步进电机驱动 至40英里/小时。 假设在速度表中将指针从10英里移动到40英里的位置,必须有以下电气步骤:--
a>如果1微步进= 1/6完整步进,则微步进总数为3000。
B>如果1微步= 1/12全步,则微步总数为6000。
5>然后按照应用说明实现平滑分析,:--
1>如果1微步进=1/6全步进:--
a>加速速度= 3000的20%= 600,因此在达到600微步之前,我必须以600微步/秒的速度行驶,
B>目标速度= 3000的60 %= 1800,即1800微步/秒,直至达到2400微步水平,
C>减速速度= 3000的20 %= 600,即600微步/秒,直到达到3000微步水平以停止Teppper电机。
2>如果1微步进=1/12全步进:--
a>加速速度= 6000的20%= 1200,因此在达到1200微步之前,我必须以1200微步/秒的速度行驶,
B>目标速度= 6000的60 %= 3600,即3600微步/秒,直至达到4800微步级别,
C>加速度= 6000的20%= 1200,即1200微步/秒,直到达到6000微步水平,以停止Teppper电机。
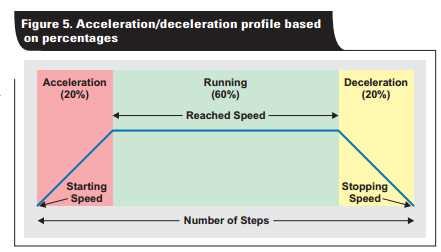
在第5点,我是否有设定加速速度和目标速度以及降速的概念?
对于像速度表这样的应用中的平滑轮廓,我应该选择1/6或1/12完整步进吗?
此致,
Dinesh
