请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:DRV8308 我们正在使用具有DRV8308的77W 8极BLDC。 我们的应用程序是一款可容纳20 kg 的小型户外车辆。 起动速度必须非常慢(约为1 km /小时)。
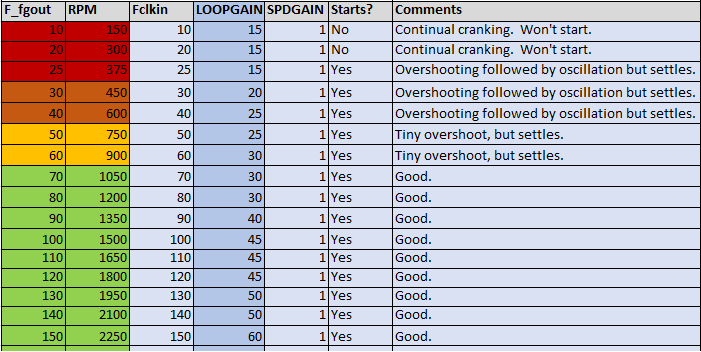
使用DRV8308 EVM和我们自己的PCB,我们无法以低于60Hz的速度获得可靠的锁环。
在我们的车辆上,60Hz转换为约1.2 km /小时,但从0 Hz直向60 Hz转换为60 Hz会导致突然的急动。 如果我们选择低于60Hz的任何速度(例如 30Hz),我们在BLDC中遇到了抖动/抖动,很难重新获得控制(必须选择大于100Hz的目标速度才能重新获得控制)。
我们如何使DRV8308在低速时获得锁?
非常感谢您的帮助。