请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:DRV8711 你好!
我们正在开发由DRV8711和外部MOSFET驱动的高压实验室泵(我们选择 了SUD50N04-8m8P MOSFET)。 电动机为POWERMAX II p22nrxc-lnn-nS-02 (根据数据表,额定电流为每个绕组3.1A,绕组电阻为1.56欧姆,绕组电感为3.9 MH)。 电源电压为24V。
根据数据表,电流感应电阻器为0.05欧姆,低侧栅网中有100欧姆系列电阻器。
我正面临着电机扭矩问题-当我提高电流时,电机开始过热,但扭矩没有增加,而且还不够。
我不熟悉步进电机的理论,我也不清楚驱动器的调整。 请你帮我调整一下吗?
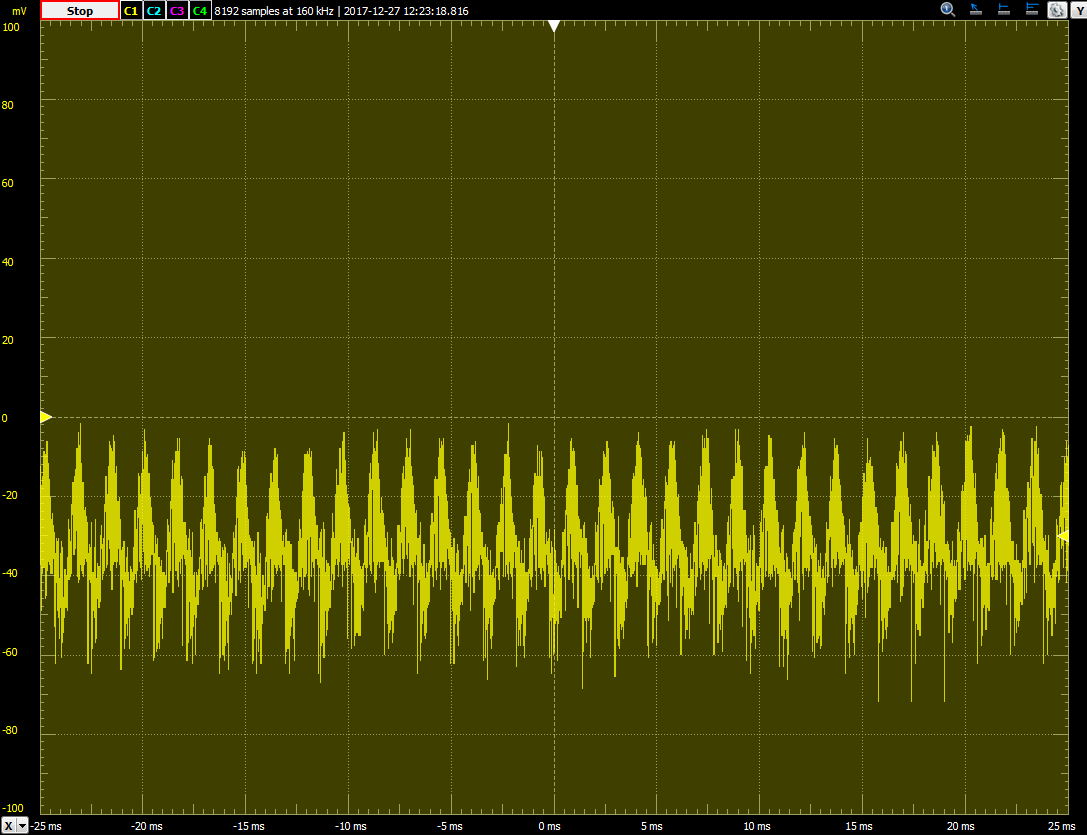
有一件事是Fery让我感到困惑-我在电流感应电阻器上看不到任何正弦信号。
随附原理图。