请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8832-Q1 主题中讨论的其他器件:DRV8830、 DRV8832、
您好!
在上一篇文章 中提到了这一点
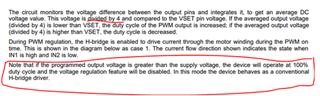
>VSET 可在电机运行时进行调节,但由于功能方框图中所示的积分器,在电机达到新目标电压之前会有一些延迟。
我有兴趣将其用于具有反向摆动任务(2轮平衡器)的机器人平台、并担心任何额外的延迟。 我们在这里讨论的延迟是多少? 微秒? 毫秒? 秒?
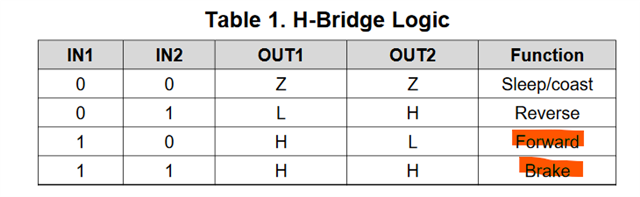
此外、我还对论坛以及数据表如何指定来控制电机速度感到好奇。 根据数据表(第7.3.2节): 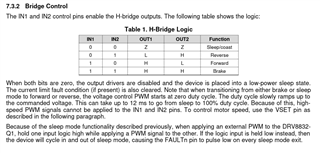
它说、我们应该"在将一个 PWM 信号施加到另一个输入逻辑高电平的同时、保持一个输入逻辑高电平。 如果逻辑输入保持低电平、则器件将循环进入和退出睡眠模式、从而在每次退出睡眠模式时使 FAULTn 引脚变为低电平脉冲。" 这是否会导致 PWM 过低而导致车轮制动而不是滑行的时间? 这似乎会产生一组接近失速电流。 有人能否澄清这是否正确、如果正确、为什么这不会在每个 PWM 周期中引起接近失速电流? 如果这是错误的、我们应该将逻辑输入保持在低电平、那么我们如何避免这个 FAULTn?
此致、
Christopher