请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8323R 主题中讨论的其他器件: DRV832X、 DRV8323
您好!
我将 BOOSTXL-DRV8323RS EVM 模块与 LP-CC1352P7-1 EVM 一起使用。
我正在尝试运行在 TI 驱动程序的帮助下编写的相当基本的代码,并以"DRV832X_MSP.....为例 "。
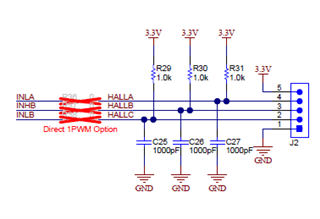
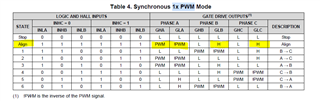
我向驱动器控制寄存器写入 SPI 命令、以允许1xPWM 模式。 现在、我将45kHz PWM 信号连接到 Inha 上。 INLA、INHB 和 INHL 将霍尔效应传感器连接到它们、而 INHC 是方向、而 INlc 是中断。 使能、方向和制动是 CC1352上的 GPIO 输出、只有使能为高电平。
根据我的逻辑分析仪的反馈、两者之间的通信似乎正常、 我能够在程序开始时将寄存器复位到其默认状态、通过按下 CP1352上的按钮、我可以向 DRV 发送命令以更改为1xPWM 模式。
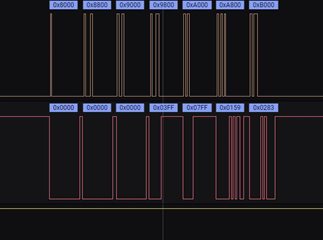
复位寄存器: 
发送命令:

来自 SPI 的反馈:

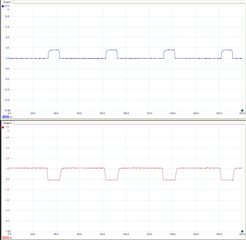
发送命令后、电机发生了一次切换、但没有移动工件。 我不熟悉 DRV8323栅极驱动器的使用、我希望能帮助 EVM 协同工作。
我还可以发送什么信息来帮助您解决问题吗? 如果您需要额外的波形、请告诉我。