Other Parts Discussed in Thread: DRV8889-Q1
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8889-Q1 大家好、我们在使用 drv889期间遇到了电机空载时电机失速的问题。 请向您咨询如何解决该问题。 具体配置如下:
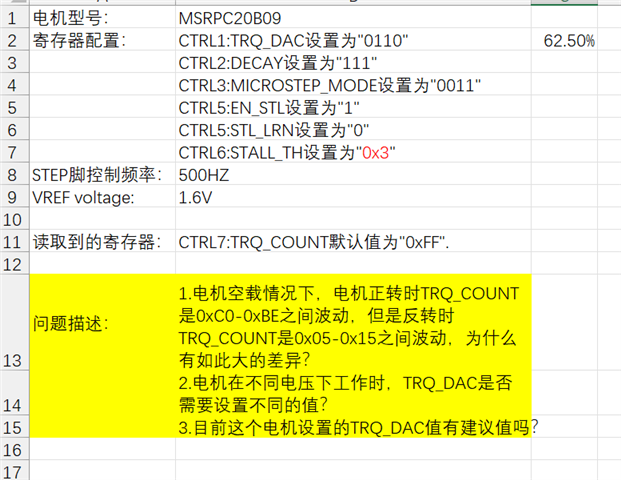
电机模型:MSRPC20B12
寄存器配置:CTRL1:TRQ_DAC 设置为"0001"
Ctrl2:DECAY 设置为"111"
CTRL3:微步进模式设置为"0011"
CTRL5:EN_STL 设置为"1"
CTRL5:STL_LRN 设置为"0"
CTRL6:STALD_Th 未设置、默认值为"0xF"
脚踏控制频率:500Hz
VREF 电压:1.6V
寄存器读取:CTRL7:TRQ_计数的默认值为"0xff"、电机运行时始终为"0"
DIAG 状态2:高概率失速电机读取的值为"1"
根据上图中的配置运行电机、并在电机卸载时读取电机失速。 请帮助您了解原因是什么、谢谢!