请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:BOOSTXL-DRV8320RS 主题中讨论的其他器件:C2000WARE、 DAC128S085
你好
我认为,我需要一些建议,如何进行电机识别。
我有
- LauchXL F280049C
- BoostXL DRV8320RS
- MotorControlSDK 3.03.00.00
- instaspin_spruhj1i.pdf
- InstaSPIN 项目和实验室用户指南 V1.00.00.00 pdf。 Instaspin FOC 实验01-13
- 我能够通过从 C:\ti\C2000Ware_MotorControl_SDK_3_03_00_00\solutions\boostxl_drv8320rs\f28004x\ccs\sensorless_foc\is05_motor_id_eabi 执行 LAB05来成功运行/识别"简单"电机(如无人机电机)
- 我将 BoostXL-DRV8320的电压范围和电流范围减小至29V 和6A、并相应地修改了 user.h (工作正常)
到目前为止非常好
现在、我需要识别"我们的"电机。 它具有一些"棘手"参数
- RS = 6.67欧姆
- ROverL = 31、4
- 磁通电压/Hz = 0、007
- 1极对
- 运行速度9000 RPM -> 33000 RPM = 150Hz -> 550Hz
- 不能从负载上断开 (它是泵)
- 惯性很小
- 具有高启动扭矩
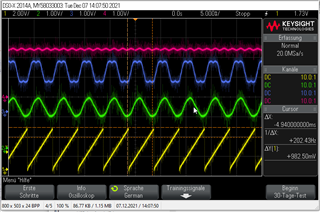
在"EST_State_RAMPUP"之前、我能够运行"电机识别实验练习"。 (工作点150Hz)。 电机正在运行。 在斜升期间测量磁通 V/Hz 的值、该值相当稳定。
完成后、电机立即停止。 我无法判断这是在"EST_State_CONSTSPEED"期间还是在"EST_State_RATEDFLUX_OL"或"EST_State_RATEDFLUX"期间
我必须手动识别 LQ 和 LD 哪些选项?
是否有更详细的说明、估算器在电机识别期间所做的工作以及要了解的原因、它为什么会在斜升后立即停止? 是否有方法可以将估算器停止在特定状态以找出导致问题的步骤?
此外:
如果我想运行电机(如果已识别)、我需要执行开环启动、直到频率为150Hz。 我该怎么做? 是否有更详细的说明、如何调整启动过程?
此外:我发现很难理解"userParams.flag_BypassMotorId"标志如何传递给估算器。 估算器如何知道它不需要运行电机识别?
感谢你的帮助
Johannes