请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8873 主题中讨论的其他器件: DRV8833
您好、团队寻求一些澄清。
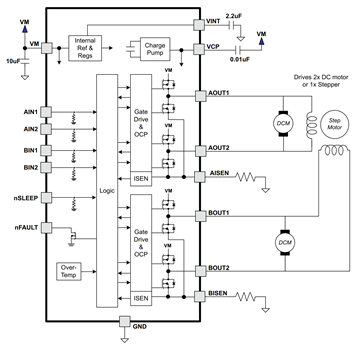
DRV8873能否以 DRV8833的形式控制步进电机(请参阅下面的方框图)? 或者等效的是2个桥臂(与上下 MOSFET 配对、请参阅下面的方框图)还是4个桥臂(如 DRV8833)?
DRV8833 (每个电路板4 x 4 = 16个加热器)
DRV8873 (每个电路板4 x 2 = 8个加热器)
2.如果4个桥臂、是否可以为 DRV8833等每个桥臂控制 DRV8873 (引脚14、15、18和19)? 从表7-23中、它看起来能够分别控制每个桥臂

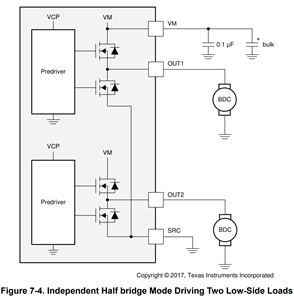
看起来 EN/IN1和 PH/IN2模式以及 PWM 模式都可以应用高达100KHz 的 PWM 信号、但独立模式如何、控制信号是什么类型?

4. 如果问题2可以单独控制四个输出中的每一个、如何仅使用 EN/IN1和 PH/IN2两个控制引脚来控制每个输出? 或通过 SPI 端口单独控制4个输出?
提前感谢您的意见。
-Mark