请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCT8316A 你(们)好
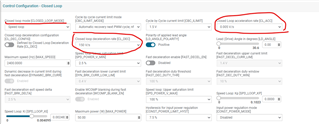
我想知道如何调节速度环路。
首先、我对 GUI 工具有几个问题。
问题1. 当 Kp 在 Ki=0时改变时、即使速度命令值改变、速度也不会改变。
在 KP=0时更改 Ki 时、速度会根据速度命令值而变化。 也可以确认过冲。
我认为参数设置与这种现象相反。

问题2. 使用速度环路作为 LOCK_LOOP_MODE 时、CL_ACC 和 CA_DEC 有效?
在我的环境中、它似乎仅在选择"disable"作为 closed_loop_mode 时有效。
我使用此版本。