

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8703-Q1 主题中讨论的其他器件: DRV8811
您好、专家、
我对 DRV8703-Q1有两个问题。
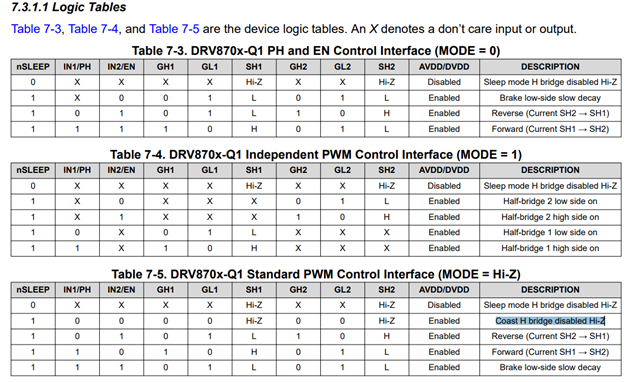
1.我们为什么需要"禁用滑行 H 桥高阻抗"? 它实现了什么类型的功能?
对于以下三种模式、PWM 信号被馈送到 EN 或 PH 引脚、以实现速度变化? 谢谢。

BR、
ElecCheng
您好、专家、
我对 DRV8703-Q1有两个问题。
1.我们为什么需要"禁用滑行 H 桥高阻抗"? 它实现了什么类型的功能?
对于以下三种模式、PWM 信号被馈送到 EN 或 PH 引脚、以实现速度变化? 谢谢。
BR、
ElecCheng
