Other Parts Discussed in Thread: DRV8323, CSD19532KTT
器件型号:DRV8323RS
尊敬的 TI 团队:
我们使用 drv8323rs BLDC 电机驱动器设计了定制板、以实现最大12000rpm 的运行...并 使用 CSD19532KTT N 沟道 MOSFET。 为了进行测试、我们将 MSP430 (Booster Drv8323 EVM GUI)与我们的定制板 drv8323rs 霍尔传感器项目相连接
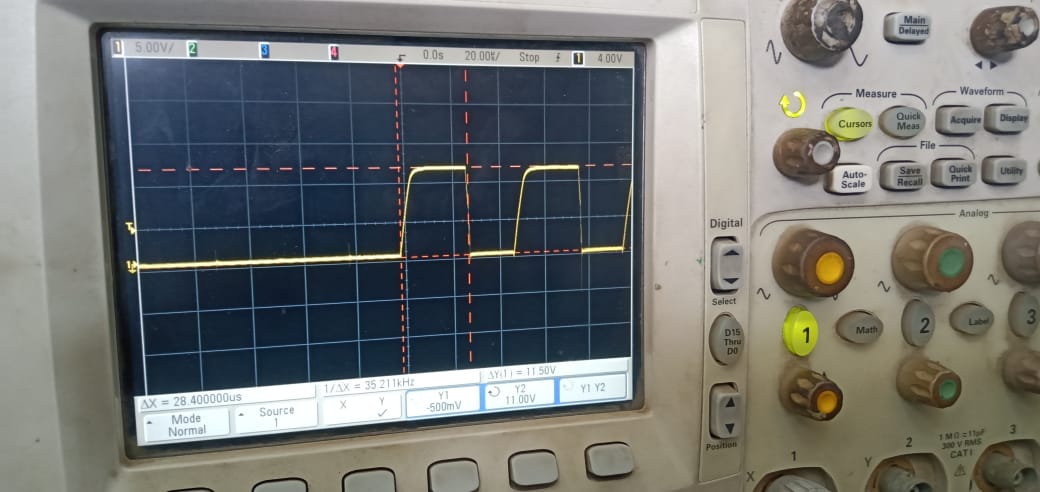
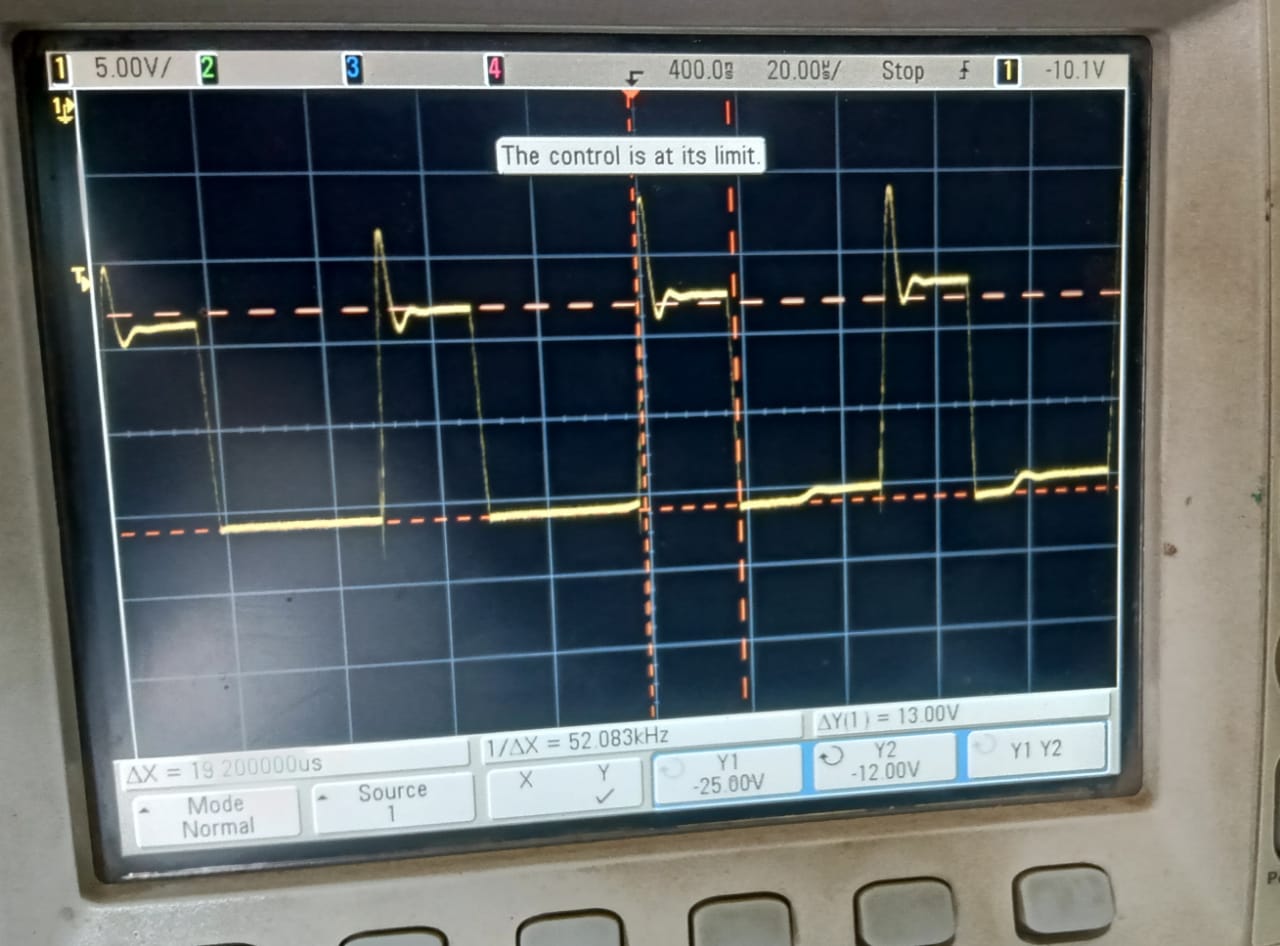
在参考智能栅极驱动器文档..changed 之后、电机未运行根据 QgD/tr 源和 QgD/TF -SINK 的随机分步 IDRIVEP 和 IDRIVEN 值。电机开始运行、最大12000rpm 也在运行。 但不符合计算得出的理论计算值。
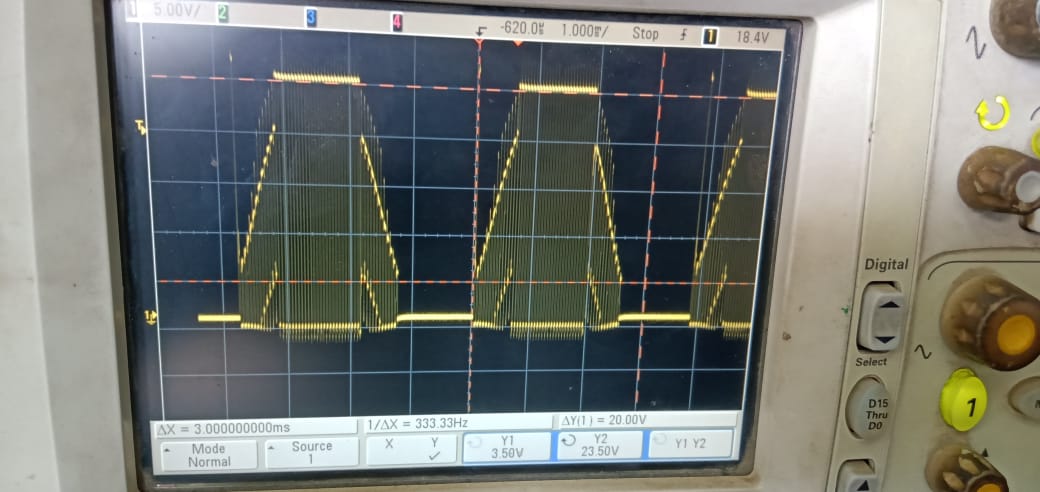
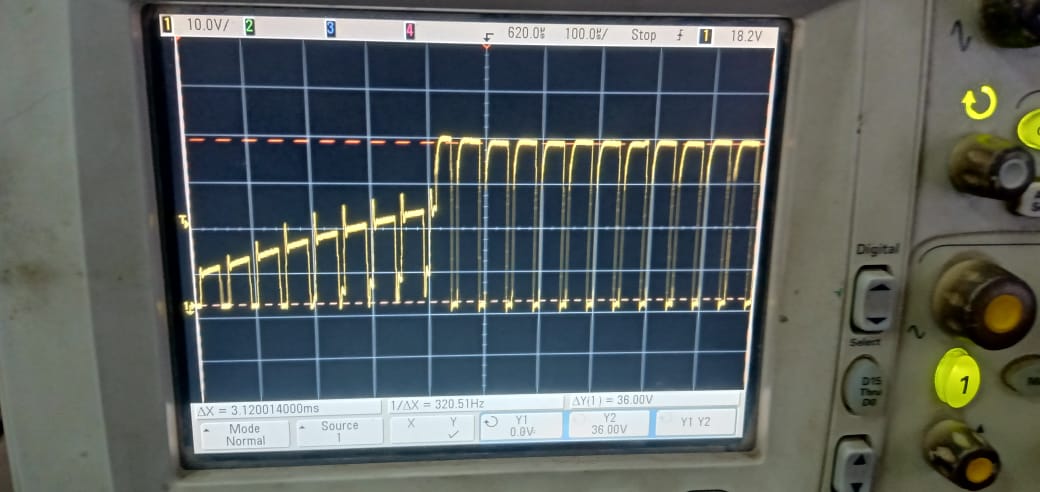
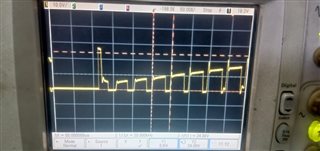
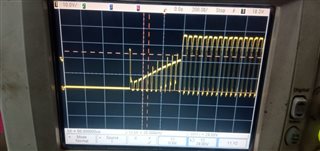
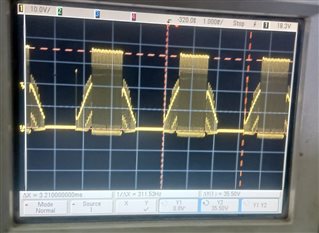
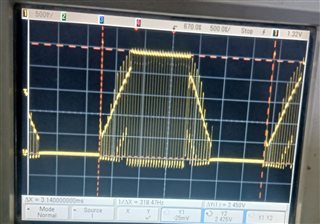
现在、我们设置 IDRIVE_HS -0x03BF 和 IDRIVE_LS -0X06BF。 电机运行有时不正确,栅极驱动器由于电压故障和过流而跳闸.. drv8323开始加热。 例如、6000rpm 运行其行程半小时... 请注意、MOSFET 不会发热... 在无负载的测试期间...
请指导我们根据 随附的 MOSFET 数据表计算 IDRIVE 值、并帮助我清除此故障并降低栅极驱动器发热...??
还需要了解 Drv8323发热的原因。 由于 IDRIVE 设置 、DRV 8323加热或任何其他参数需要在德州仪器提供的基于霍尔的传感代码中进行更改。
我们最初使用 launchpad MSP430和 booster Drv8323rs EVM GUI 进行了测试。 成功工作正常。 但我们在定制板中仅更改了 MOSFET。 空载时发热...
对于另一个具有2安培负载和 Booster Pack 的应用、我们在 Drv8323 Booster 板中面临50度以上的热量、例如 Drv8323和 MOSFET。 情况下。 请指导我们在给定的 BLDC 电机源代码中调整参数 ???

谢谢、此致