请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
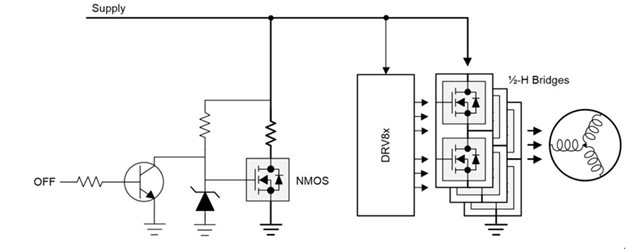
器件型号:DRV8350R 我们正在使用 DRV835RS5栅极驱动器和 DSPIC33ch 微控制器开发电机控制器单元。
PWM 频率设置为10kHz、控制器时钟设置为8MHz。
8极 BLDC 电机在48V 空载时的额定转速为3200 RPM
我正在使用每5uS 调用一次的计时器中断来实现换向。
在更高的 RPM (>80% DC)下 、电机开始缺少换向、栅极驱动器停止电机运转。
如果使用轮询实现相同的应用、则工作占空比高达85%。但我需要在 MCU 中添加额外的功能、因此必须继续处理中断。
您能帮您解决问题。