

Other Parts Discussed in Thread: DRV8312, TMDSCNCD28069ISO, CONTROLSUITE
Thread 中讨论的其他器件: DRV8312、controlSUITE
您好、支持团队、
使用 drv8332/drv8312kit 时、我遇到一些问题
我尝试驱动无传感器 BLDC 电机。
我尝试输入的第一项内容(互补双极降压和互补低侧固定)与复位输入序列同步、如下所示

dio 0至 PWM A、dio 1至 PWM B、dio 3至 PWM c 和 dio 6用于复位 A、dio 7用于复位 B、dio 8用于复位 C
如 drv8332数据表第14页中所述。
电机不会在两个方向上随机旋转。
我尝试多次调试序列并将其更改为不同的 PWM 方案、但没有变化。
我测试了 drv8332数据表图10第18页中提到的功能测试。
我得到、当任何相位的 PWM 为高电平且相应的复位发生变化时、我得到:
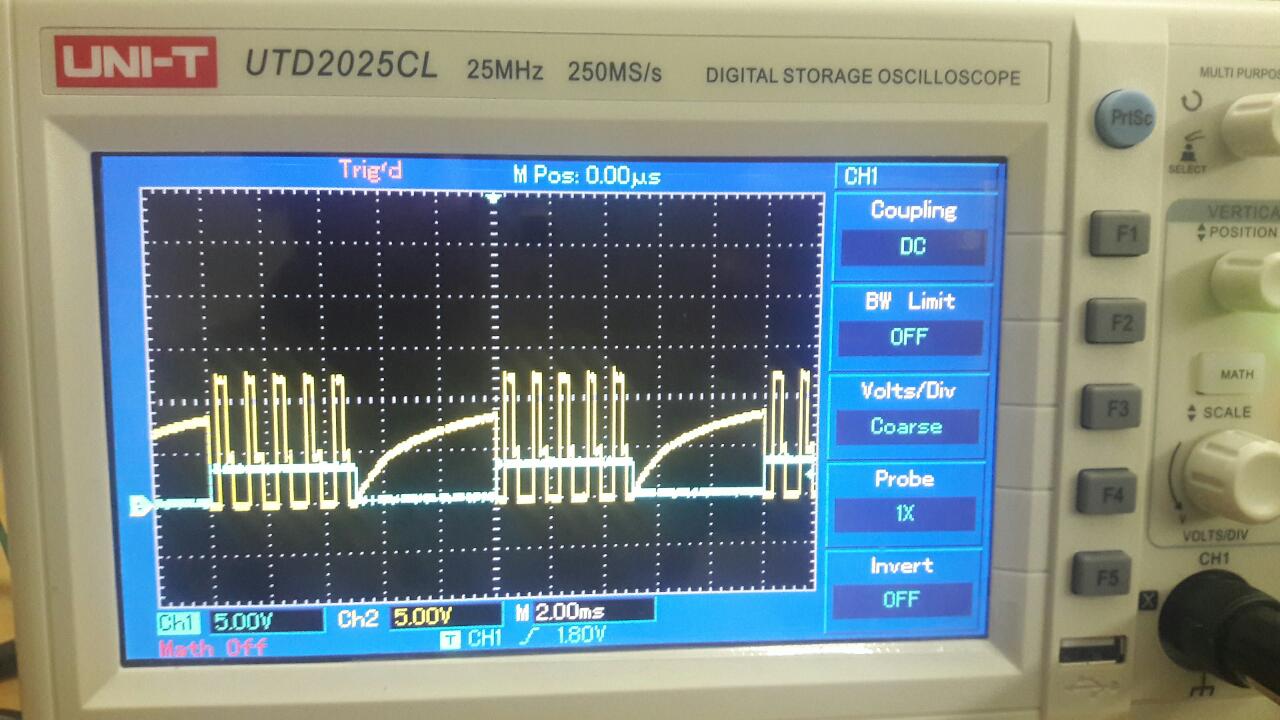
黄色是输出、蓝色是 PWM 为高电平时的复位。
当复位为零时、无法识别的是输出、为什么它得到该曲线。
我最后运行 drv8312和 带 ti DRV8312GUIv5的 TMDSCNCD28069ISO 控制卡、 我运行电机并注意到:
- PWM 信号映射到 drv 的复位引脚
1和0序列应用于 drv 的 PWM

黄色表示 PWM、蓝色表示复位。
我无法理解、为什么并且我注意到、当我从适配器运行 pvdd 24伏时、输出引脚上的反电动势最大为12伏。
因此、我需要知道反电动势的电平、以了解换向 或确保我获得的信息是直流 us 电压/2。
我需要您的支持来驱动电机、并了解为什么 EMF/输出上出现这种意外衰减的电压
并了解使用 drv8332/8312驱动电机的正确顺序以及反电动势的正确级别和注意事项。
TI 用于驱动控制卡中电机的序列理念。
提前感谢。
