请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV260XSW-Linux 主题中讨论的其他器件:DRV2603、 DRV2604、 DRV2604L、 DRV2605
大家好、
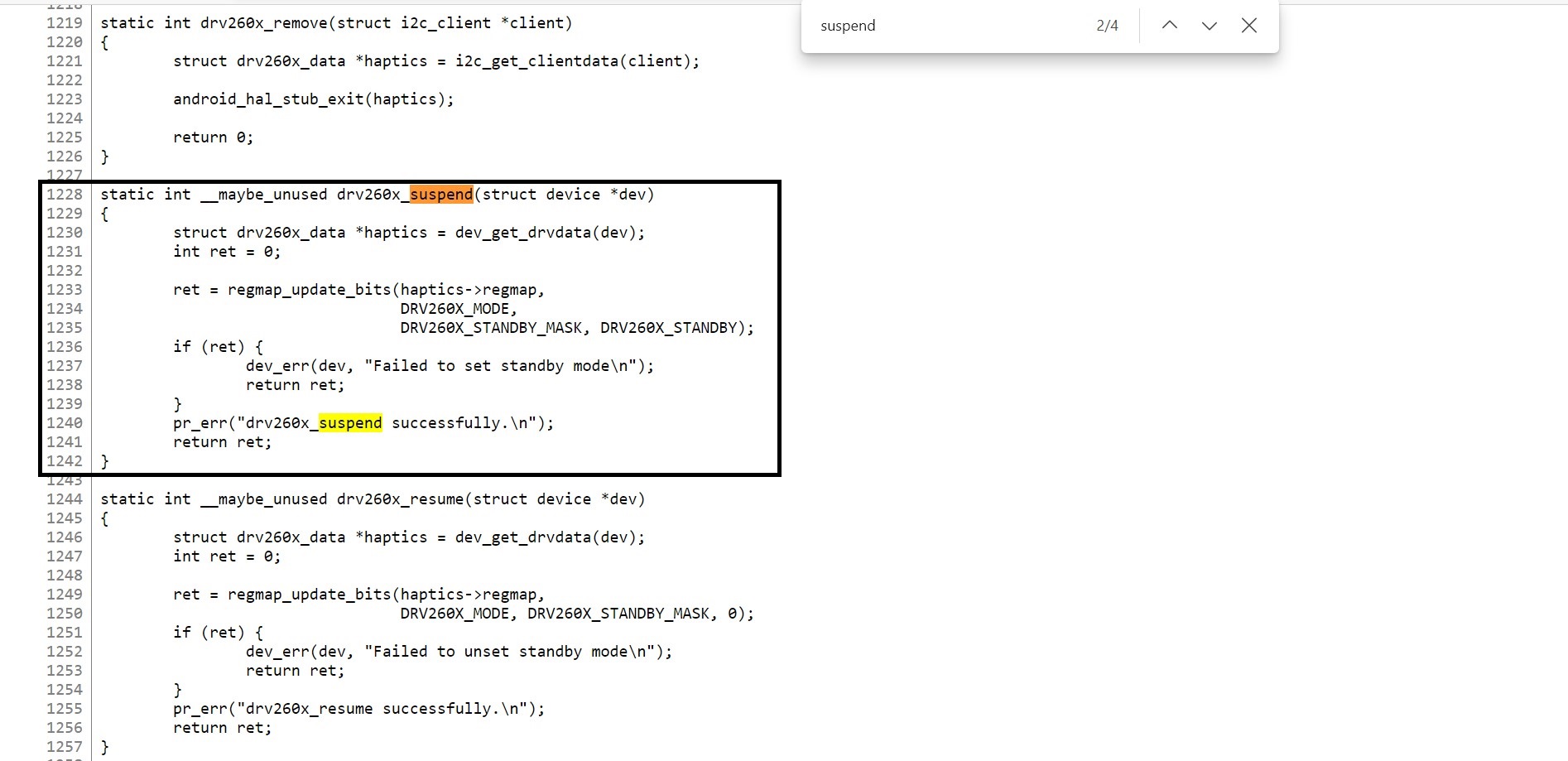
如果我们询问"drv260x.c"的内容、您会介意吗?
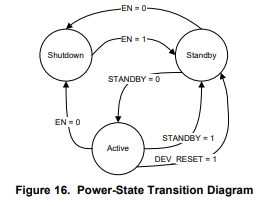
以下 drv260x_resume()是否表示在电源状态转换中关断至活动状态(数据表图16)?
--------------------------------------
静态 int __mort_unused drv260x_resume (struct device *dev)
{
struct drv260x_data * haptics = dev_get_drvdata (dev);
int ret = 0;
mutex_lock (&haptics->input_dev->mutex);
if (input_device_enabled (haptics->input_dev)){
RET =电脑控制器启用(触觉->电脑控制器);
如果(RET){
DEV_ERR (dev、"启用稳压器失败\n");
转至输出;
}
RET = regmap_update_bits (haptics->regmap、
DRV260X_MODE、
DRV260X_STANDBY_MASK、0);
如果(RET){
DEV_ERR (dev、"未能取消设置待机模式\n");
reguler_disable (触觉->稳压器);
转至输出;
}
gpioD_set_value (haptics->enable_gpio、1);
}
输出:
mutex_unlock (&haptics->input_dev->mutex);
回程;
}
--------------------------------------
此致、
雅丽塔