您好!
我们目前以以下方式使用 DRV8837:它是用于高功率转矩电机的次级低压驱动器。 其目的是在所需转矩较低时更好地控制电机电流。 DRV8837用于提供高达1A 的环路控制电流、之后主驱动器接管并驱动电机中高达10A 的电流。
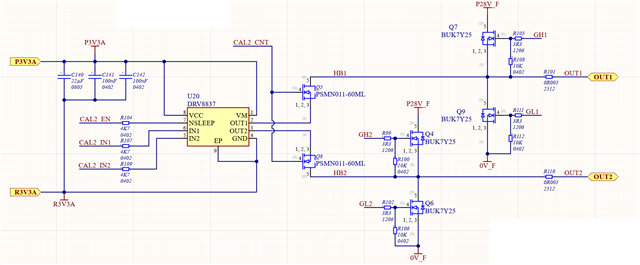
由于主驱动器与28VDC 配合使用、因此需要将两个驱动器分开。 这是通过2个 MOSFET 晶体管来完成的:它们在 DRV8837使用时通过,并在主驱动器运行时打开,以避免通过低压轨产生故障。
但是、我们注意到、当 P3V3A = 3、3V 时、DRV8837使用其电源轨 P3V3A 供电时、其功率损耗非常高。 因此、我们稍微更改了电路板、使 P3V3A = 5.3V、以便我们可以与数据表中的 RDSon 数据进行比较。
电机为2.35欧姆、13.8mH、无反电动势。
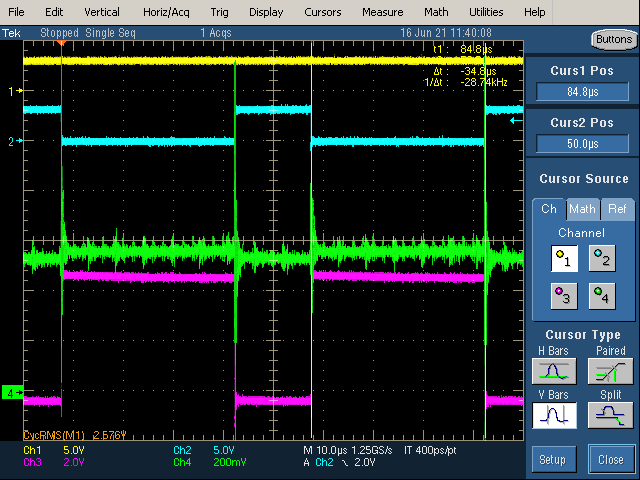
提供给 IN1/IN2引脚的命令是一个70%占空比前向/制动命令:IN1 = 3、3V、IN2 = 3、3V 30%的时间、0V 70%的时间。 PWM 频率为20kHz。
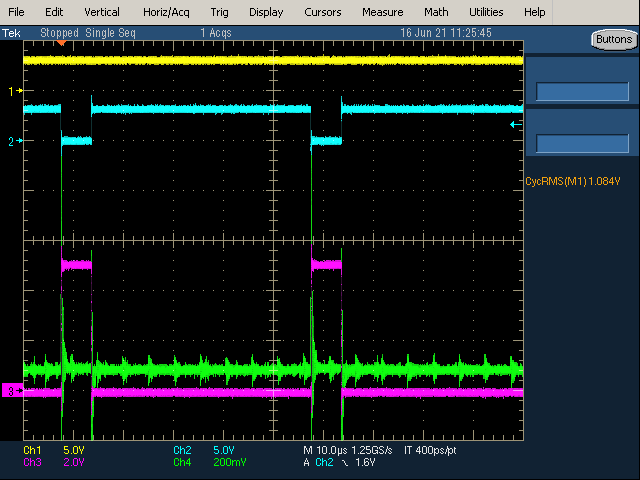
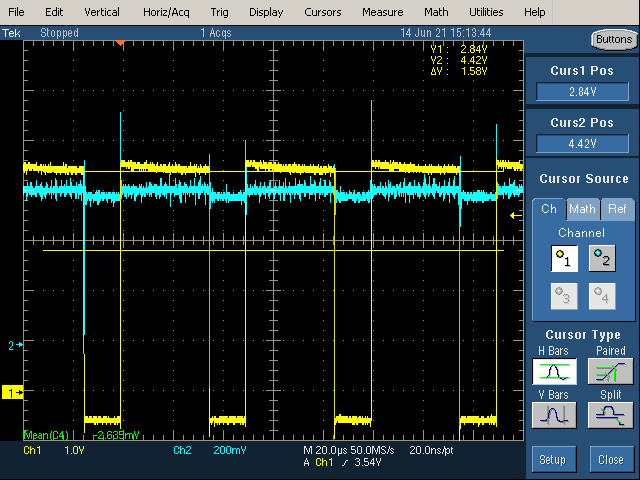
下面是 OUT1 (黄色)和 OUT2 (蓝色)波形。 当处于正向状态时、V (OUT1)= 4、4V 且 V (OUT2)= 0.55V。 当处于制动状态时、V (OUT1)=-0.55V & V (OUT2)= 0.5V。
然后、电机端子上的平均电压约为2.35V、我们的电流探针证实了这一点、显示电流约为1A
为什么我们在高侧和低侧都看到如此高的 Rdson? 计算得出的总 Rdson (Top+BOT)为1.5欧姆!
然后,我们使用16%的 PWM 尝试了相同的命令类型(前进/制动),结果为:
- V (OUT1)= 5.1V
- V (OUT2)= 100mV
这对应于340mA 的电机电流、以及接近1欧姆的总 Rdson (Top+BOT)。
即使我们的 PCB 设计不当(并非如此)、也无法在没有充分意图的情况下生成+600 Mohms 电源或接地迹线。
P3V3A 电压轨上 µF 大约120 μ A (施加 V BIAS 和最坏情况下的容差)、DRV8837是该电压轨上唯一的 IC。
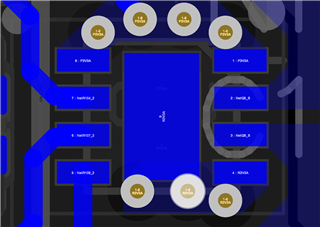
V (OUT1)和 V (OUT2)直接在 DRV8837的输出端测量、我们还测量了 V (HB1)和 V (HB2)(在分离晶体管之后)、以确保它们没有故障。 我们在 几个10mV 内将 V (OUT1)=V (HB1)和 V (OUT2)=V (HB2)设为 V。