请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCT8316Z-Q1 主题中讨论的其他器件:MCT8316Z
您好!
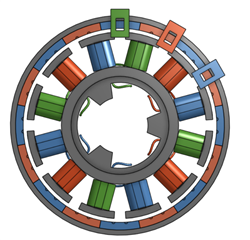
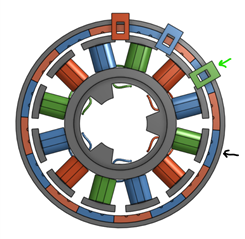
简而言之、我有一个使用 MCT8316Z 驱动器 IC 的 PCB 工作原型、具有板载电机线圈和霍尔传感器、但我对哪种霍尔传感器的最佳放置方式略有困惑。
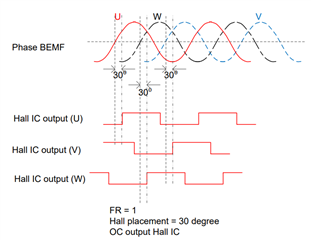
我已将霍尔传感器放置在霍尔信号和 BEMF 之间具有30°相位差的位置、如下图所示:
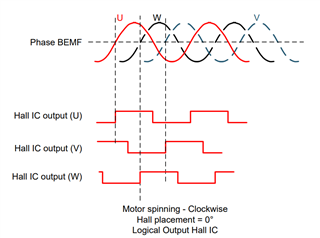
许多电机制造商使用30°的时序偏移(我之所以选择它)、但由于这是 MCT8316中超前角设置的绝对最大限制、我想知道0°相位差是否会更好:
在性能或功耗方面是否有差异? 是否有 TI 推荐的设计?
此致、
Emil Jacobsen