请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
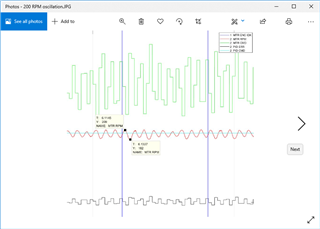
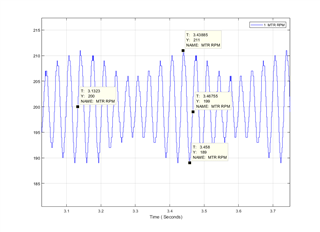
器件型号:MCT8316Z 我们使用 MCT8316Z 控制器来驱动200RPM 到6000RPM 的小型电机。 控制环路的要求是调节进入 MCT8316Z 的 PWM、使其以由各种系统参数决定的固定旋转速度运行。 在低速下(例如200RPM)、我们观察到旋转速度的变化高于预期、即使我们在具有固定 PWM 设置的开环模式下运行也是如此。 频率是旋转速度的倍数、变化约为+/-5%。 下图显示了控制环路尝试消除纹波、但在该频率下实际上无法产生任何影响。 如果建议使用任何控制器自举设置来提高性能、我希望获得帮助。