请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8847 大家好、

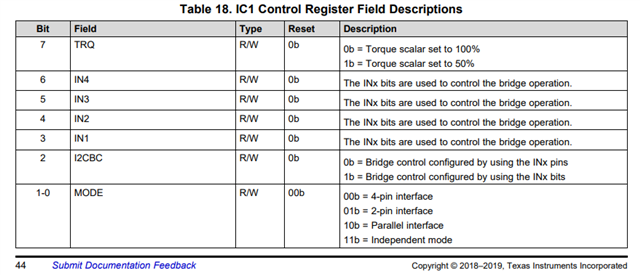
上表是8847的配置。
模式选择通过 DRV8847S 器件变体中的 I2C 寄存器来完成(请参阅编程部分)。
因此,我有一些问题:
1、应如何配置8847S 的 IN1至 IN4? 可以将其悬空吗? 还是应该接地?
2. NSLEEP 是否直接设置为高电平以保持启用状态?
NFault 信号是否可以直接变为 NC、它是否影响对 I2C 信号进行多路复用的传感器的使用? 该器件和传感器位于同一 I2C 总线上。
谢谢。
此致、Charlie