请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:DRV8243-Q1 尊敬的团队:
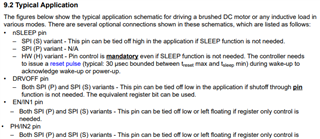
我的客户希望使用 寄存器控制方法来驱动 BDC。 根据下面的描述、我认为这是可行的、只使用寄存器的控制方法可以实现与只使用引脚的控制方法完全相同的功能、对吧? 如果他们使用这种方法、他们可以悬空 IN1、IN2和 DRVOFF 引脚、对吧? 这里是否存在任何风险?
此外、如果不使用、如何连接 nFault 引脚?

谢谢、此致、
雪利